Control System Designer
Design single-input, single-output (SISO) controllers
Description
The Control System Designer app lets you design single-input, single-output (SISO) controllers for feedback systems modeled in MATLAB® or Simulink® (requires Simulink Control Design™ software).
Using this app, you can:
Design controllers using:
Interactive Bode, root locus, and Nichols graphical editors for adding, modifying, and removing controller poles, zeros, and gains
Automated PID, LQG, or IMC tuning
Optimization-based tuning (requires Simulink Design Optimization™ software)
Automated loop shaping
Tune compensators for single-loop or multiloop control architectures.
Analyze control system designs using time-domain and frequency-domain responses, such as step responses and pole-zero maps.
Compare response plots for multiple control system designs.
Design controllers for multimodel control applications.

Open the Control System Designer App
MATLAB Toolstrip: On the Apps tab, under Control System Design and Analysis, click the app icon.
MATLAB command prompt: Enter
controlSystemDesigner.Simulink Toolstrip: On the Apps tab, under Control Systems, click the app icon.
Examples
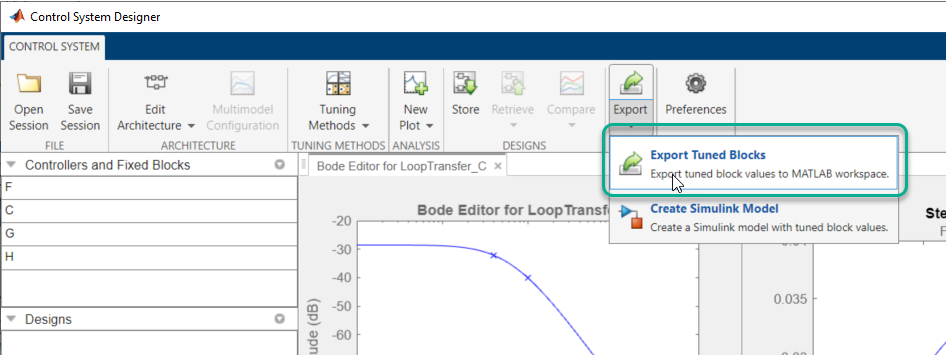
After designing your controller in Control System Designer, you can export your design to the MATLAB Workspace for further analysis or design.
In Control System Designer, on the Control System tab, under Export, click Export tuned blocks.
In the Export Model dialog box, in the Select Design
drop-down list, choose the design that you want to export. You can select
either the Current Design or one of the stored
designs from the Data Browser.
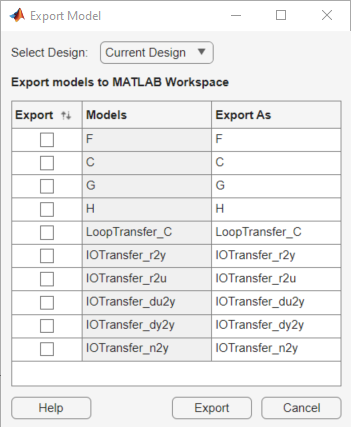
In the Export models to MATLAB Workspace table, in the Export column, select the models you want to export.
For all designs, you can export the controller and prefilter models. Also,
for the Current Design, you can export the fixed
block models and any responses from the Data
Browser.
For more information on the prefilter, controller, and fixed blocks in each control architecture, see Feedback Control Architectures in Control System Designer.
In the Export as column, you can specify an alternate name for the exported model. Exporting a model with the same name as an existing variable in the MATLAB Workspace overwrites the variable.
To save the selected models to the MATLAB Workspace, click Export.
After designing your controllers in Control System Designer, to simulate your system, you can automatically generate a Simulink model for your control architecture.
On the Control System tab, under Export, click Create Simulink Model.
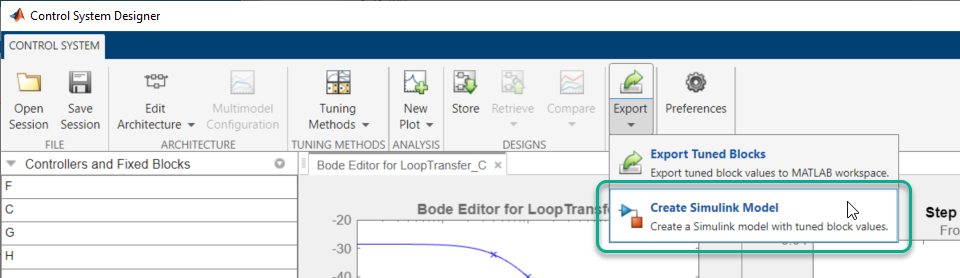
The app exports the controllers and fixed blocks for the current design to the MATLAB Workspace and generates a Simulink model that matches the current control architecture. For more information on the controllers and fixed blocks in each control architecture, see Feedback Control Architectures in Control System Designer.
For example, if you design a control system using configuration 1,
Control System Designer exports C,
F, G, and H to
the MATLAB Workspace and generates the following Simulink model.
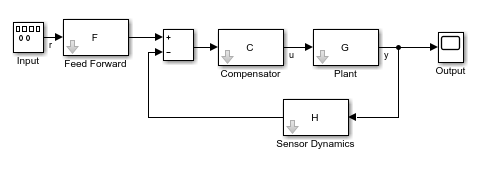
In the generated model, the Input block is a Signal Generator (Simulink). Using this block, you simulate your model with different input waveforms, such as sine waves or random signals. To generate a step response, replace the Input block with a Step (Simulink) block.
To generate a Simulink model for a stored design, first make that design current. On the Control System tab, under Retrieve, select the design for which you want to generate a model.
Related Examples
Programmatic Use
controlSystemDesigner opens the Control System
Designer app using the following default control architecture:

The architecture consists of the LTI objects:
G — Plant model
C — Compensator
H — Sensor model
F — Prefilter
By default, the app configures each of these models as a unit gain.
controlSystemDesigner(
initializes the compensator, C, to the SISO LTI model
plant,comp)comp.
controlSystemDesigner(
initializes the sensor model, H, to plant,comp,sensor)sensor.
sensor can be any SISO LTI model or an array of such
models. If you specify both plant and
sensor as LTI model arrays, the lengths of the arrays must
match.
controlSystemDesigner(
initializes the prefilter model, F, to the SISO LTI model
plant,comp,sensor,prefilt)prefilt.
controlSystemDesigner( opens the
app and specifies the initial graphical editor configuration.
views)views can be any of the following character vectors, or a
cell array of multiple character vectors.
"rlocus"— Root locus editor"bode"— Open-loop Bode Editor"nichols"— Open-loop Nichols Editor"filter"— Bode Editor for the closed-loop response from prefilter input to the plant output
In addition to opening the specified graphical editors, the app plots the closed-loop, input-output step response.
controlSystemDesigner(
specifies the initial plot configuration and initializes the plant, compensator,
sensor, and prefilter using the specified models. If a model is omitted, the app
uses the default value.views,plant,comp,sensor,prefilt)
controlSystemDesigner( opens
the app and initializes the system configuration using the initialization data
structure initData)initdata. To create initdata,
use sisoinit.
controlSystemDesigner( opens
the app and loads a previously saved session. sessionFile)sessionFile is
the name of a session data file on the MATLAB path. This data includes the current system architecture and plot
configuration, and any designs and responses saved in the Data
Browser.
To save a session, in the Control System Designer app, on the
Control System tab, click ![]() Save Session.
Save Session.