comm.RaisedCosineTransmitFilter
Apply pulse shaping by interpolating signal using raised-cosine FIR filter
Description
The comm.RaisedCosineTransmitFilter
System object™ applies pulse shaping by interpolating an input signal using a raised
cosine finite impulse response (FIR) filter. The FIR filter has
(FilterSpanInSymbols ×
OutputSamplesPerSymbol + 1) tap coefficients.
To apply pulse shaping by interpolating an input signal using a raised cosine FIR filter:
Create the
comm.RaisedCosineTransmitFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
txfilter = comm.RaisedCosineTransmitFilter
txfilter = comm.RaisedCosineTransmitFilter(Name,Value)comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',15)
configures a raised cosine transmit filter System object with the filter span set to 15 symbols.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
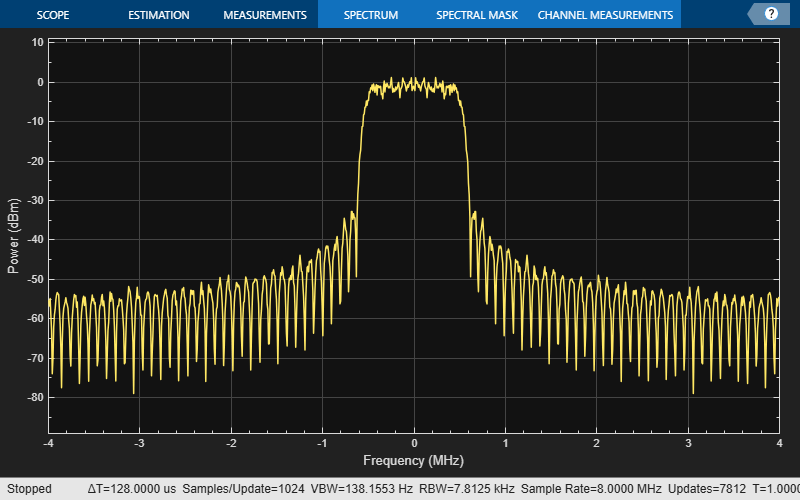
Interpolate a signal using root-raised-cosine (RRC) transmit filter object and display the spectrum of the filtered signal.
Create random bipolar symbols at a symbol rate of 1e6 symbols per second.
data = 2*randi([0 1],1e6,1) - 1;
Create a RRC transmit filter object. The default sets the filter to a square-root shape and the number of samples per symbol to 8.
txfilter = comm.RaisedCosineTransmitFilter
txfilter =
comm.RaisedCosineTransmitFilter with properties:
Shape: 'Square root'
RolloffFactor: 0.2000
FilterSpanInSymbols: 10
OutputSamplesPerSymbol: 8
Gain: 1
Filter the data by using the RRC filter.
filteredData = txfilter(data);
Create a spectrum analyzer object with an 8e6 sampling rate. This sampling rate matches the sampling rate of the filtered signal.
spectrumAnalyzer = spectrumAnalyzer(SampleRate=8e6);
View the spectrum of the filtered signal by using the spectrum analyzer object.
spectrumAnalyzer(filteredData) release(spectrumAnalyzer)
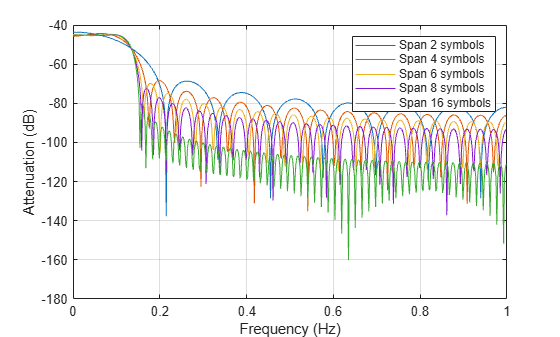
Create interpolated signals from a root-raised-cosine (RRC) filter with various filter spans. Examine the magnitude response of the various filter designs.
Create RRC filter objects setting various filter spans.
txfilt2 = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',2); txfilt4 = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',4); txfilt6 = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',6); txfilt8 = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',8); txfilt16 = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',16);
Use the coeffs and freqz object functions to obtain the filter response for various filter spans. Plot the magnitude response for various filter spans.
n = 512; % Number of points to compute frequency response [h2,w2] = freqz(coeffs(txfilt2).Numerator,n); [h4,w4] = freqz(coeffs(txfilt4).Numerator,n); [h6,w6] = freqz(coeffs(txfilt6).Numerator,n); [h8,w8] = freqz(coeffs(txfilt8).Numerator,n); [h16,w16] = freqz(coeffs(txfilt16).Numerator,n); plot([w2 w4 w6 w8 w16]/(pi), ... mag2db(abs([h2 h4 h6 h8 h16]))) grid xlabel("Frequency (Hz)") ylabel("Attenuation (dB)") legend('Span 2 symbols','Span 4 symbols','Span 6 symbols', ... 'Span 8 symbols','Span 16 symbols')
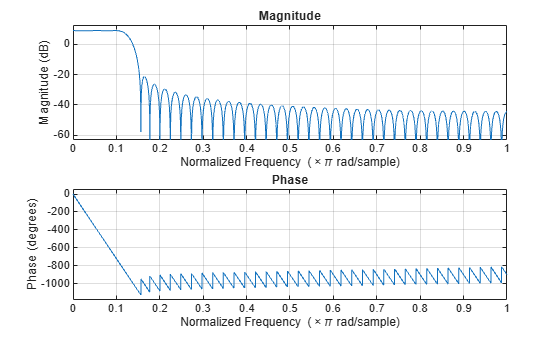
Create a root-raised-cosine (RRC) transmit filter System object™, and then plot the filter response. The results show that the linear filter gain is greater than unity. Specifically, the passband gain is greater than 0 dB.
txfilter = comm.RaisedCosineTransmitFilter; freqz(txfilter)
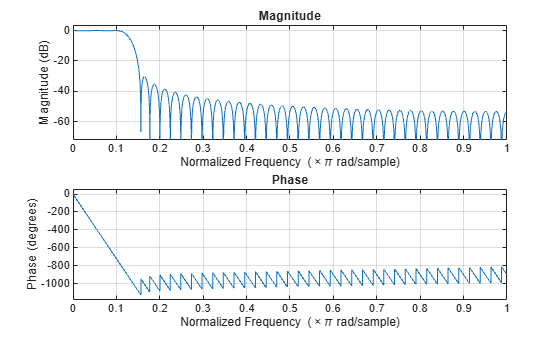
Obtain the filter coefficients by using the coeffs object function and adjust the filter gain to unit energy.
b = coeffs(txfilter);
Because a filter with unity passband gain must have filter coefficients that sum to 1, set the linear filter gain to the inverse of the sum of the filter tap coefficients, b.Numerator.
txfilter.Gain = 1/sum(b.Numerator);
Verify that the resulting filter coefficients sum to 1.
bNorm = coeffs(txfilter); sum(bNorm.Numerator)
ans = 1.0000
Plot the filter frequency response again. The results now show that the passband gain is 0 dB, which is unity gain.
freqz(txfilter)
When you create a multirate filter that uses polyphase decomposition, the polyphase function lets you analyze the component filters individually by returning the components as rows in a matrix. Using polyphase with an output argument returns a matrix containing the polyphase decomposition with individual rows defining each subfilter.
rcfilter = comm.RaisedCosineTransmitFilter; p = polyphase(rcfilter)
p = 8×11
-0.0060 0.0097 -0.0133 0.0165 -0.0186 0.3729 -0.0186 0.0165 -0.0133 0.0097 -0.0060
-0.0051 0.0058 -0.0041 -0.0029 0.0297 0.3621 -0.0524 0.0301 -0.0190 0.0112 0
-0.0029 0 0.0075 -0.0255 0.0892 0.3308 -0.0707 0.0368 -0.0206 0.0105 0
0.0004 -0.0068 0.0196 -0.0477 0.1552 0.2823 -0.0742 0.0364 -0.0184 0.0079 0
0.0043 -0.0134 0.0300 -0.0653 0.2218 0.2218 -0.0653 0.0300 -0.0134 0.0043 0
0.0079 -0.0184 0.0364 -0.0742 0.2823 0.1552 -0.0477 0.0196 -0.0068 0.0004 0
0.0105 -0.0206 0.0368 -0.0707 0.3308 0.0892 -0.0255 0.0075 0 -0.0029 0
0.0112 -0.0190 0.0301 -0.0524 0.3621 0.0297 -0.0029 -0.0041 0.0058 -0.0051 0
To analyze the component filters individually, use one of the analysis functions on the corresponding polyphase component vector. For example, to plot the impulse response of the first component filter, use impz on the first vector of the polyphase matrix.
impz(p(1,:))

Extended Capabilities
Version History
Introduced in R2013b