Video Player is loading.
Using Simulink with STM32 Discovery and STM32F4xx-Based Boards
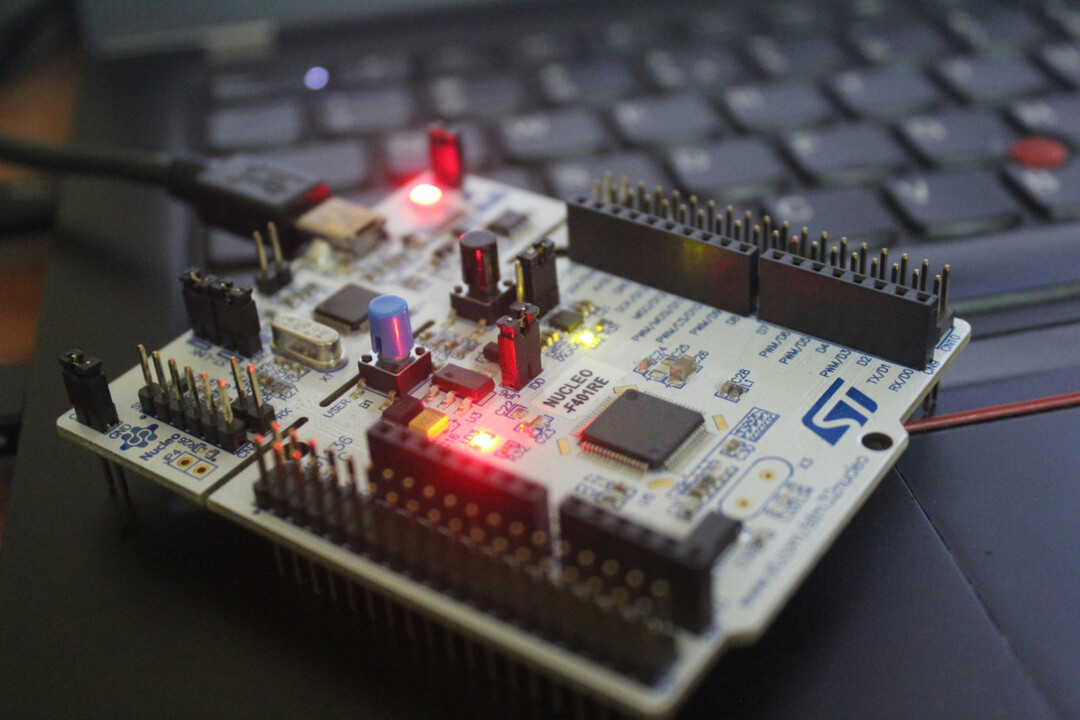
Deploy a Simulink® model to blink the onboard LED on an STM32 Nucleo F401RE board using the Embedded Coder™ Hardware Support Package for STMicroelectronics® STM32 Discovery and STM32F4xx processor-based boards.
Published: 21 Nov 2021

Featured Product
Embedded Coder
Up Next:

Related Videos:




Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)