Building a Position Estimator for a Robot | Mission on Mars Robot Challenge
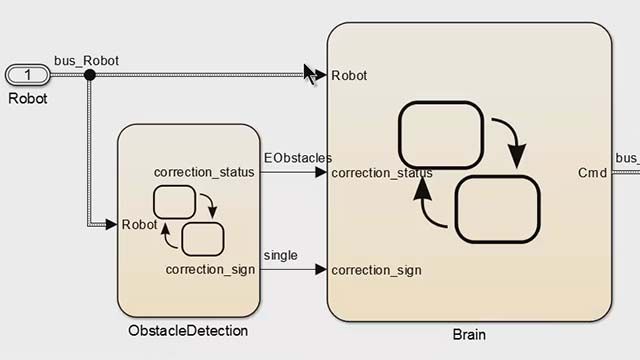
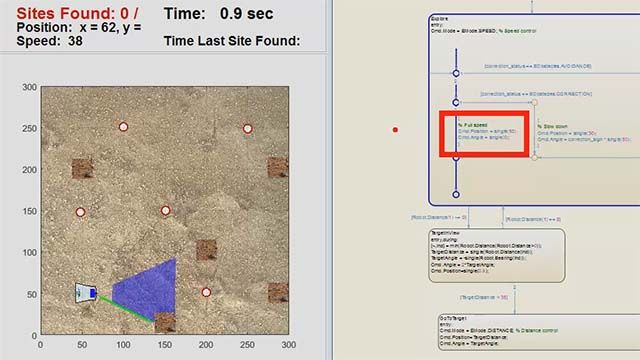
Overview of a simple position estimator for a wheeled robot, i.e. an algorithm assessing the absolute robot position based on relative wheel angle information.
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.