Airframe Optimization with MATLAB
From the series: Aerospace
Joshua Williams, Cornell University Unmanned Air Systems
To design model airplanes, Joshua Williams of Cornell University Unmanned Air Systems (CUAir) joins Connell D’Souza of MathWorks to talk about using the genetic algorithm function from the Global Optimization Toolbox to optimize a model airplane’s dimensions. While the airplane that he and his colleagues at CUAir built was for the SUAS competition, this is applicable to anyone building airplanes in the same class.
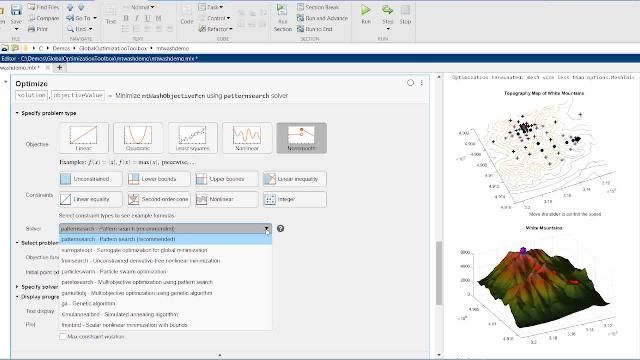
A genetic algorithm can be used to optimize constrained and unconstrained optimization problems. It involves setting up a fitness function to be optimized. The genetic algorithm tries to find the minimum of the fitness function. To understand how this algorithm works, view the documentation for the Global Optimization Toolbox. An additional resource is the Optimization App, which will help you set up a genetic algorithm among other optimization algorithms using an interactive app.
You can use this method to optimize your airplane’s dimensions to meet an objective. Joshua talks about how he defined key parameters to meet the objective that the team set for themselves.
Published: 4 Dec 2017