velodyneFileReader
Read point cloud data from Velodyne PCAP file
Description
The velodyneFileReader object reads point cloud data from a
Velodyne® packet capture (PCAP) file.
Creation
Syntax
Description
veloReader = velodyneFileReader(FileName,DeviceModel)FileName and DeviceModel
properties directly. The reader supports the VLP-16, Puck LITE, Puck Hi-Res,
VLP-32C, HDL-32E, HDL-64E, VLS-128, and Velarray H800 device models.
veloReader = velodyneFileReader(FileName,DeviceModel,Name=Value)OrganizePoints=true) returns an
organized point cloud.
Name-Value Arguments
Properties
Object Functions
Examples
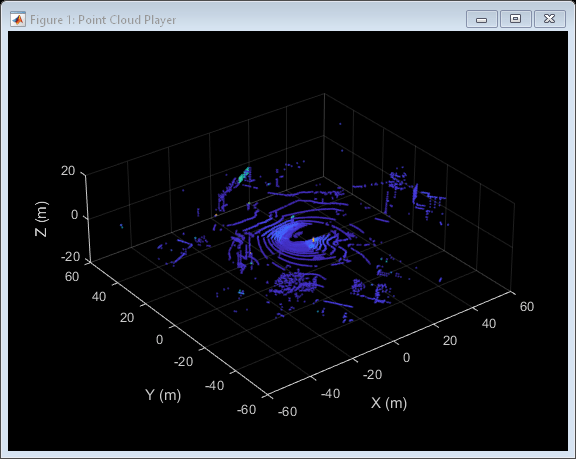
Use the velodyneFileReader to read a packet capture (PCAP) file from a Velodyne® sensor. View point clouds using pcplayer.
Read in point clouds by using a Velodyne® file reader. Specify the PCAP file to read and the Velodyne® device model.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Define x-, y-, and *z-*axes limits for pcplayer in meters. Label the axes.
xlimits = [-60 60]; ylimits = [-60 60]; zlimits = [-20 20];
Create the point cloud player.
player = pcplayer(xlimits,ylimits,zlimits);
Label the axes.
xlabel(player.Axes,'X (m)'); ylabel(player.Axes,'Y (m)'); zlabel(player.Axes,'Z (m)');
The first point cloud of interest is captured at 0.3 second into the file. Set the CurrentTime property to that time to being reading point clouds from there.
veloReader.CurrentTime = veloReader.StartTime + seconds(0.3);
Display the point cloud stream for 10 seconds. Remove the last while condition to display the full stream.
Use hasFrame to check if a new frame is available. Iterate through the file by calling readFrame to read in point clouds. Display them using the point cloud player. Remove the last while condition to display the full stream.
while(hasFrame(veloReader) && player.isOpen() && (veloReader.CurrentTime < veloReader.StartTime + seconds(10))) ptCloudObj = readFrame(veloReader); view(player,ptCloudObj.Location,ptCloudObj.Intensity); pause(0.1); end
Version History
Introduced in R2018aSee Also
Functions
Objects
Topics
- Lidar Data Acquisition and Sensor Simulation (Lidar Toolbox)
- Get Started with Velodyne LiDAR Sensor Acquisition (Lidar Toolbox)
- Build a Map from Lidar Data