bboxwarp
Apply geometric transformation to bounding boxes
Syntax
Description
bboxB = bboxwarp(bboxA,tform,ref)bboxA according to the geometric
transformation defined by tform. Bounding boxes can be axis-aligned
rectangles, rotated rectangles, or cuboids. The spatial reference object,
ref, defines the output view into which the boxes are transformed.
This function supports 2-D and 3-D bounding boxes.
bboxB = bboxwarp(bboxA,tform,ref,"OverlapThreshold",overlapThreshold)
Examples
Read an image.
I = imread("peppers.png");Define bounding boxes and labels.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Define an affine transform to horizontally flip and translate the image.
tform = affinetform2d([-1 0 50; 0 1 50; 0 0 1]);
Create an output view for imwarp.
rout = affineOutputView(size(I),tform);
Warp the image.
J = imwarp(I,tform,"OutputView",rout);Warp the boxes.
[bboxB,indices] = bboxwarp(bboxA,tform,rout); labelsB = labelsA(indices);
Display the results.
annotatedI = insertObjectAnnotation(I,"Rectangle",bboxA,labelsA); annotatedJ = insertObjectAnnotation(J,"Rectangle",bboxB,labelsB); figure montage({annotatedI,annotatedJ})

Input Arguments
Bounding boxes, specified as an M-by-4, M-by-5, or M-by-9 nonsparse numeric matrix of M bounding boxes. Each row, M, of the matrix defines a bounding box as either an axis-aligned rectangle, a rotate rectangle, or a cuboid. The table below describes the format of the bounding boxes.
| Bounding Box | Description |
|---|---|
| Axis-aligned rectangle |
Defined in spatial coordinates as an M-by-4 numeric matrix with rows of the form [x y w h], where:
|
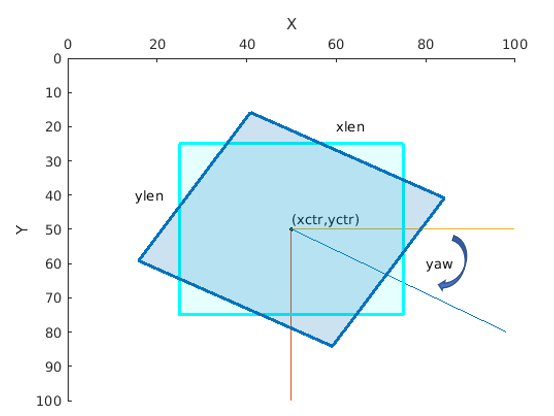
| Rotated rectangle |
Defined in spatial coordinates as an M-by-5 numeric matrix with rows of the form [xctr yctr xlen ylen yaw], where:
|
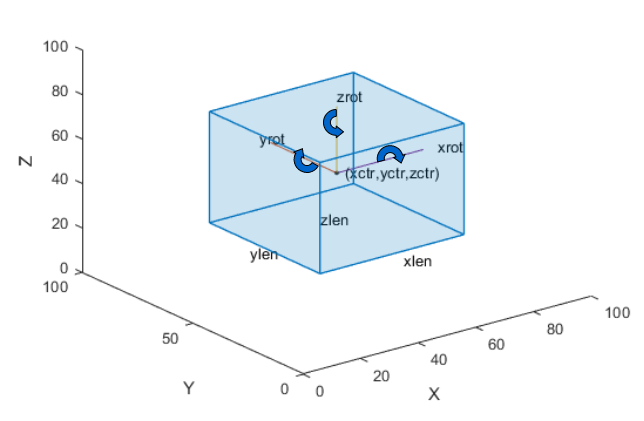
| Cuboid |
Defined in spatial coordinates as an M-by-9 numeric matrix with rows of the form [xctr yctr zctr xlen ylen zlen xrot yrot zrot], where:
The figure shows how these values determine the position of a cuboid.
|
Geometric transformation, specified as an affinetform2d
object for rectangular inputs or an affinetform3d
object for cuboid inputs. The bboxwarp function supports affine transformations
consisting only of scale, rotation, and translation.
Note
Rotated rectangles do not support reflection or shear transformations.
Spatial reference, specified as an imref2d object for rectangular inputs or imref3d object for cuboid inputs. To obtain one of these objects, you can
use the imwarp or the
affineOutputView function. The object defines the output view to
transform boxes. Boxes that are transformed completely outside of the output view
defined by ref are
discarded.
[J,rout] = imwarp(I,tform); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
rout = affineOutputView(size(I),tform) J = imwarp(I,tform,OutputView=rout); [bboxB,indices] = bboxwarp(bboxA,tform,rout);
Overlap threshold, specified as a positive scalar less than or equal to
1. The amount of overlap between transformed boxes and the region
W, defined by the output view, is defined as:
If the computed overlap value is greater than the value of the
threshold property, then the transformed boxes are clipped to the
bounding rectangle border. Otherwise, the boxes are discarded. Lowering the threshold
can result in parts of the object getting discarded.