imwarp
Apply geometric transformation to image
Syntax
Description
[___] = imwarp(___,
specifies the type of interpolation to use.interp)
[___] =
imwarp(___,
specifies name-value arguments to control various aspects of the geometric
transformation. Name=Value)
Tip
If the input transformation tform does not define a
forward transform, then use the OutputView name-value
argument to accelerate the transformation.
Examples
Read and display a grayscale image.
I = imread('cameraman.tif');
imshow(I)
Create a 2-D affine transformation.
A = [1 0.5 0; 0 1 0; 0 0 1]; tform = affinetform2d(A);
Apply the transformation to the image.
J = imwarp(I,tform); imshow(J)

Load and display a 3-D MRI volumetric image.
load("mri");
mriVolume = squeeze(D);
volshow(mriVolume);![]()
Create a 3-D rigid transformation object that rotates the image around the y-axis.
theta = [0 22.5 0]; transl = [0 0 0]; tform = rigidtform3d(theta,transl);
Apply the transformation to the image and display the result.
mriVolumeRotated = imwarp(mriVolume,tform); volshow(mriVolumeRotated);
![]()
Read and display an image. To see the spatial extents of the image, make the axes visible.
I = imread("kobi.png"); I = imresize(I,0.25); iptsetpref(ImshowAxesVisible="on") imshow(I)
Create a 2-D affine transformation that shears the image in the horizontal direction. The amount of horizontal shear is equal to half of the height of the image.
A = [1 -0.5 0; 0 1 0; 0 0 1]; tform = affinetform2d(A);
Create three different output views for the image and transformation, using the three different bounds styles.
szI = size(I); followOutput = affineOutputView(szI,tform,BoundsStyle="FollowOutput"); centerOutput = affineOutputView(szI,tform,BoundsStyle="CenterOutput"); sameAsInput = affineOutputView(szI,tform,BoundsStyle="SameAsInput");
Apply the transformation to the input image using each of the different output view styles. Then, display the resulting images using the spatial referencing information returned by the affineOutputView function.
The "FollowOutput" bounds style returns the complete transformed image. The transformed image is wider than the original image.
JFollowOutput = imwarp(I,tform,OutputView=followOutput);
imshow(JFollowOutput,followOutput)
title("FollowOutput Bounds Style")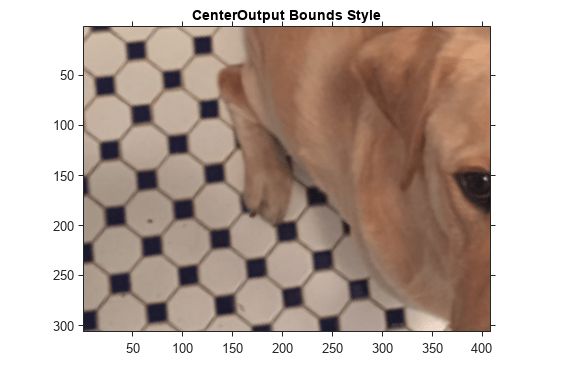
The "CenterOutput" bounds style crops the transformed image to the size of the input image. The crop window is centered on the transformed image, so the top-left corner of the crop window is not at the origin.
BCenterOutput = imwarp(I,tform,OutputView=centerOutput);
imshow(BCenterOutput,centerOutput)
title("CenterOutput Bounds Style")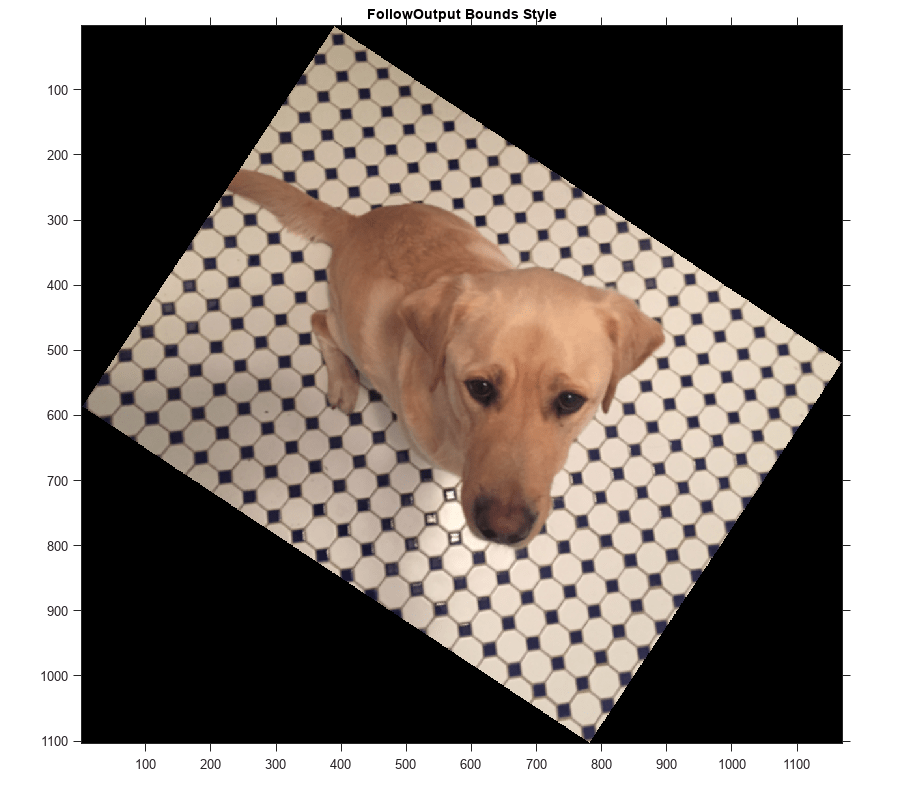
The "SameAsInput" bounds style also crops the transformed image to the size of the input image. The top-left corner of the crop window is at the origin.
BSameAsInput = imwarp(I,tform,OutputView=sameAsInput);
imshow(BSameAsInput,sameAsInput)
title("SameAsInput Bounds Style")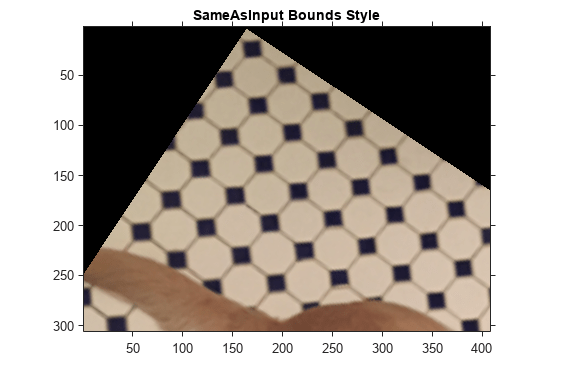
iptsetpref(ImshowAxesVisible="off")Input Arguments
Name-Value Arguments
Output Arguments
Tips
If you want to apply an identical geometric transformation to a batch of same-sized images, consider using the
Warperobject and thewarpfunction. Compared toimwarp, theWarperobject speeds up the transformation significantly for batches of small to medium-sized images, with diminishing returns for larger images.
Algorithms
imwarp determines the value of pixels in the
output image by mapping locations in the output image to the corresponding locations in
the input image (an inverse mapping). When the center of a pixel in the output image
does not map to the center of a pixel in the input image, imwarp
interpolates within the input image to calculate the output pixel value.
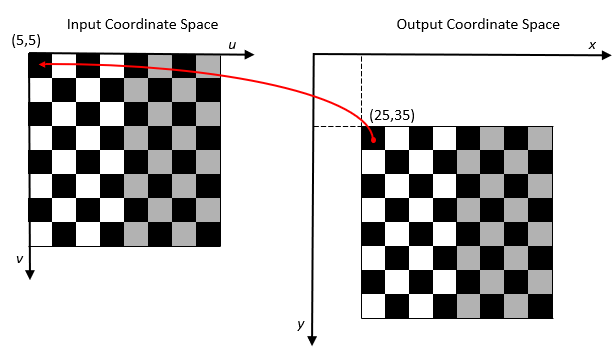
The figure illustrates a translation transformation of a checkerboard image, in which each square is 10-by-10 pixels. By convention, the axes in input space are labeled u and v and the axes in output space are labeled x and y. Using the inverse transformation, the pixel with (x,y) coordinates (25,35) in the output coordinate space is mapped to the (u,v) coordinates (5,5) in the input coordinate space.
imwarp performs the mapping using world coordinates. For more
information, see Image Coordinate Systems.