Power Conversion
Explore power conversion examples that illustrate DC-DC converter, PFC (power factor conversion) and MPPT (maximum power point tracker) capabilities.
Topics
- Examples Supporting Texas Instruments C2000 Processors
C2000™ Microcontroller Blockset reference examples that are supported for each processor family.
- Realtime Data Logging with Two-Model Approach
Log data in realtime with two model approach.
- Load Data/Code to Flash and Run from RAM on TI C2000
Execute performance-sensitive functions in RAM instead of ROM on TI C2000 processors.
- Enhance Code Execution Speed in TI C2000 Simulink Applications
Optimize code for efficient execution.
- Measuring Code Execution Time on TI C2000 Using Custom Code Blocks
Use custom code blocks to measure code execution time.
Featured Examples

Digital DC/DC Buck Converter Using Peak Current Mode Control
Use the Comparator Subsystem (CMPSS) to regulate buck converter output voltage (BOOSTXL-BUCKCONV) using Peak Current Mode Control (PCMC) for Texas Instruments™ C2000™ Microcontroller Blockset. Using this example, you can:

Closed Loop Control of a DC-DC Buck Converter
Model a closed loop control of a DC-DC buck converter in the C2000™ Microcontroller Blockset. The model runs on a F28379D Launchpad connected to the C2000 digital power supply booster pack.
C2000 DC-DC Buck Converter Using MCU
Develop a DC-DC buck converter power regulator application. Typical challenges with power conversion simulation and deployment include:
Photovoltaic Inverter with MPPT Using Solar Explorer Kit
Implement a photovoltaic (PV) inverter system using the C2000™ Microcontroller Blockset. The example uses the Texas Instruments Solar Explorer Kit along with the Texas Instruments F28035 controlCARD.

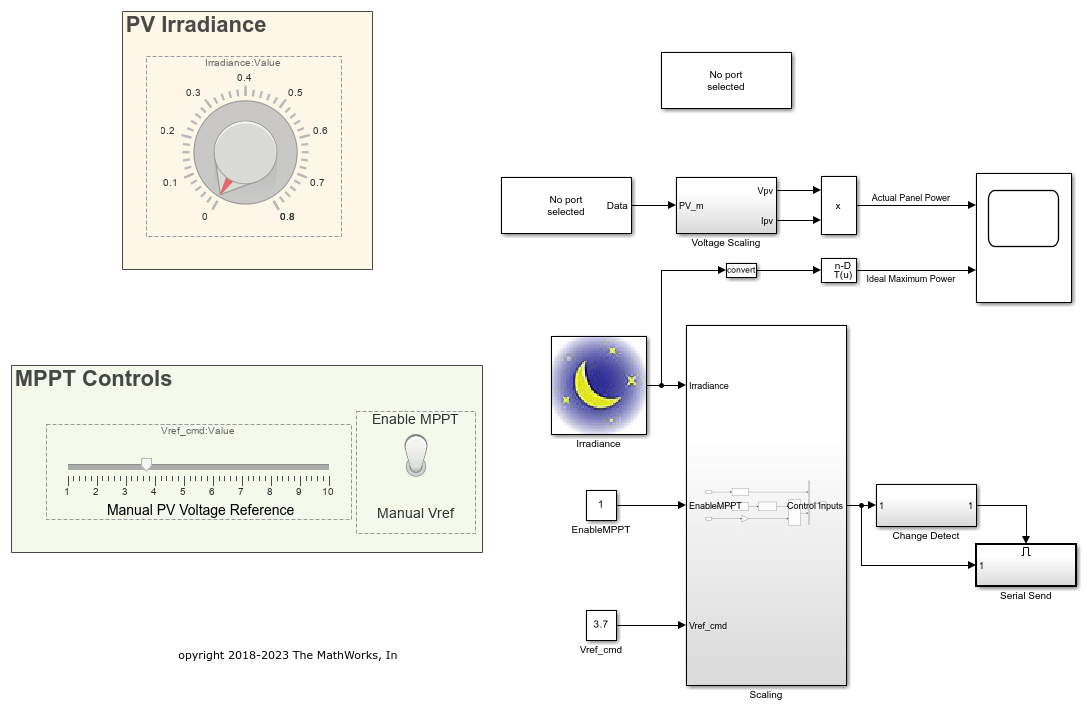
MPPT Using Flyback Converter in TI Solar Micro Inverter Development Kit
Implement a Maximum Power Point Tracking (MPPT) Algorithm along with control of DC-DC flyback converter using the C2000™ Microcontroller Blocket. The example uses the Texas Instruments™ Solar Micro Inverter Development Kit along with the Texas Instruments F28069M/F28035 controlCARD.
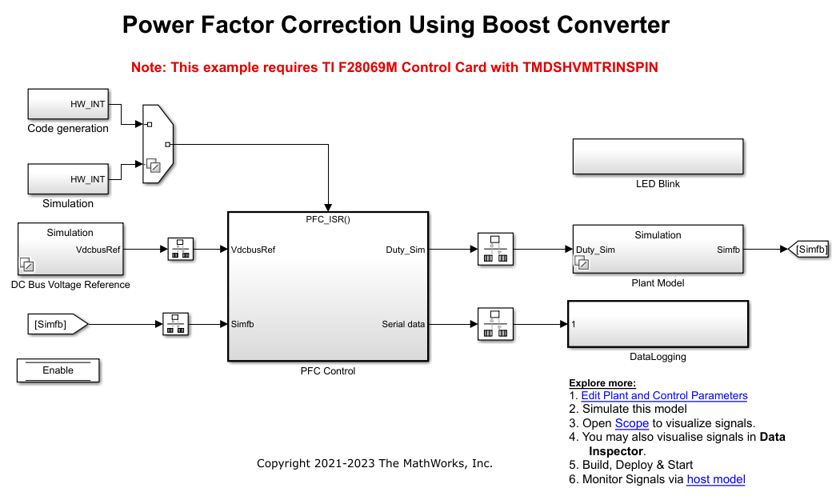
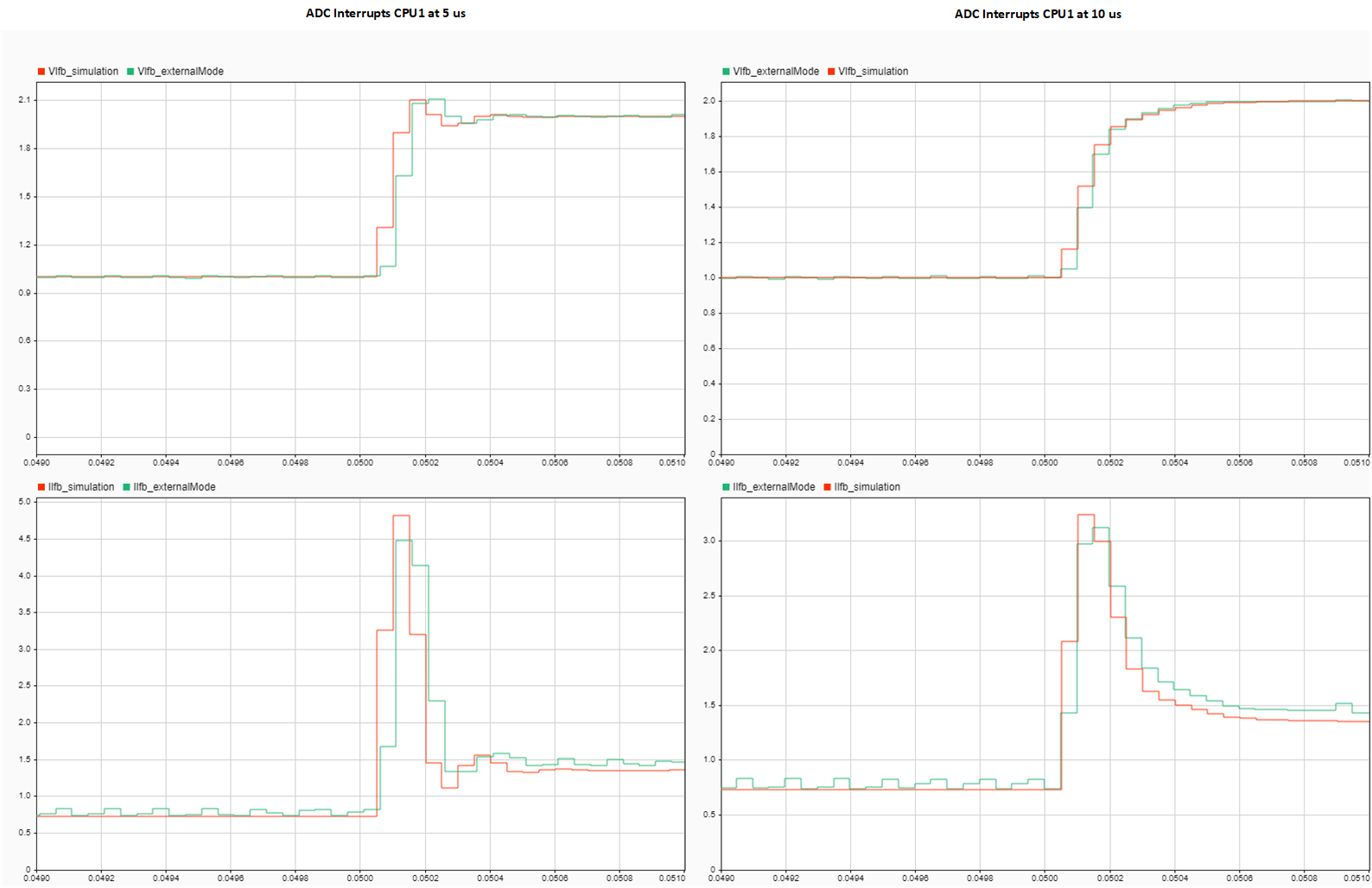
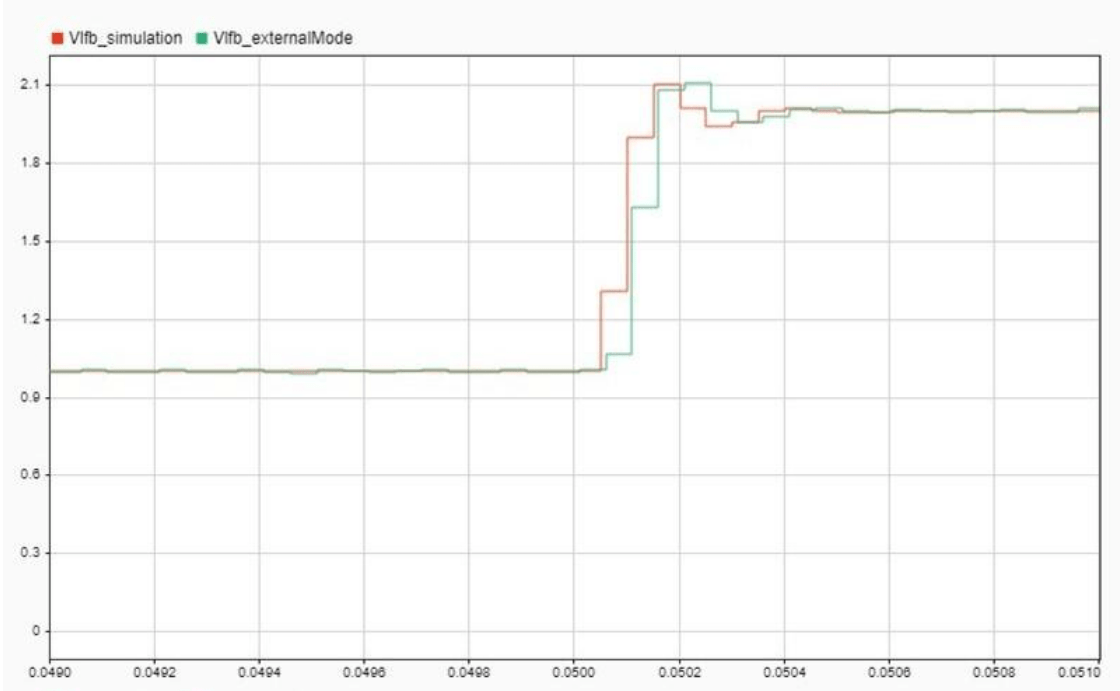
Field Oriented Control of PMSM with Input Power Factor Correction Using Boost Converter
Implement power factor correction (PFC) using a boost converter with the C2000™ Microcontroller Blockset. The example uses the Texas Instruments F28069M controlCARD with high voltage motor control kit (TMDSHVMTRINSPIN).

Read Position of BiSS-C Absolute Encoder
Read a position of an absolute encoder using the bidirectional serial/synchronous-continuous (BiSS-C) open protocol in the unidirectional mode. This example implements the BiSS-C protocol using TI C2000 peripherals such as CLB, SPI, ePWM, X-BAR, and GPIO using the C2000™ Microcontroller Blockset.
Control Law Accelerator in DC-DC Power Conversion
Manage the voltage mode control (VMC) algorithm for a closed loop DC-DC power conversion system by using the Control Law Accelerator (CLA). An auxiliary software current protection loop is managed by C2000 CPU. In the TMS320F28379D and similar processor families, the CLAs execute the hard-realtime portions of the algorithm can connect with hardware peripherals such as ADC's and PWM's. The C2000 CPU is better suited for hard real-time portions of the algorithm that require multitasking, handling of asynchronous events, and communication with other cores. While this example extends the DC-DC buck converter developed in the DC-DC Buck Converter on MCU example, the strategy presented can be applied to any design where a resource intensive hard real-time process executes on the CLA and real-time multi-tasking processes run on C2000 CPU.
Network Managed DC-DC Power Converter
Manage the asynchronous network commands to a high-speed, closed-loop DC-DC buck converter control algorithm executing the C2000 processor by using the ARM® Cortex®-M processor. In the TMS320F28388D and similar processor families, the C2000 processors execute the hard-realtime portions of the algorithm and use peripherals, such as ADC and PWM. In contrast, the ARM Cortex-M processor manages the high-level asynchronous communication, such as UDP or TCP, that connect the MCU to external systems. This example implements a technique that extends the DC-DC buck converter in the DC-DC Buck Converter on MCU example. You can apply this technique to any design in which a hard-realtime process executes on the C2000 MCU and a high-level asynchronous communication executes on the ARM Cortex-M processor.
Serially Managed DC-DC Power Converter Using C2000
Use a serial connection to manage a high-speed, closed-loop DC-DC buck converter control algorithm executing the Texas Instruments® C2000™ processor. In most C2000 microcontroller unit (MCU) families, the MCU executes the hard-realtime portions of the algorithm and uses peripherals, such as ADC and PWM. The MCU also includes one or more low-power, serial communication interfaces (SCI) connections. SCI can be used to connect the C2000 MCU to external systems without the need to use other processors, such as ARM® Cortex®-M, for higher level interfaces, such as network UDP or TCP. This example implements a technique that extends the DC-DC buck converter in the DC-DC Buck Converter Using MCU. You can apply this technique to any design in which a hard-realtime process executes on the C2000 MCU and requires low-power connectivity using an SCI.
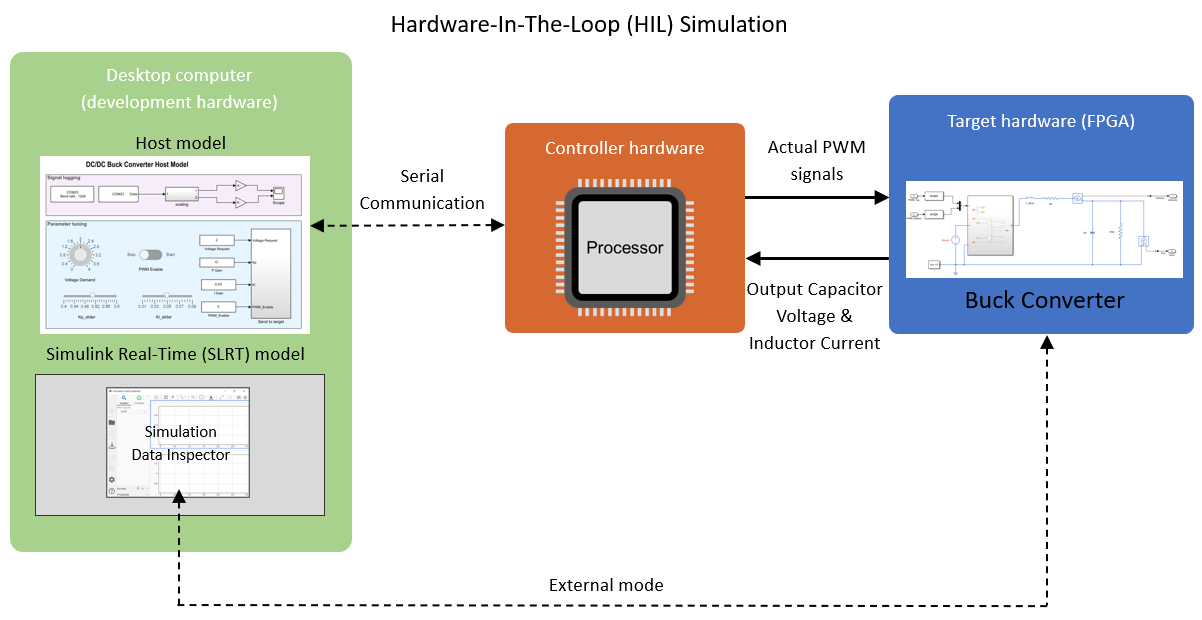
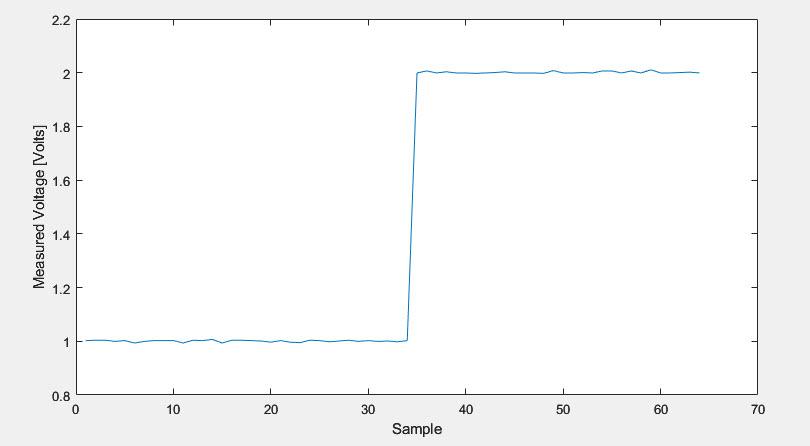
Closed Loop Control of Buck Converter using Hardware-In-The-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the closed loop control of buck converter. The control algorithm requires output voltage feedback, which is then fed to the PI controller. The controller outputs the duty ratio which varies to control the output voltage. For more information, see Closed Loop Control of a DC-DC Buck Converter.