odeToVectorField
Reduce order of differential equations to first-order
Description
V = odeToVectorField(eqn1,...,eqnN)eqn1,...,eqnN to
a system of first-order differential equations, returned as a symbolic
vector.
[ converts V,S] =
odeToVectorField(eqn1,...,eqnN)eqn1,...,eqnN and
returns two symbolic vectors. The first vector V is
the same as the output of the previous syntax. The second vector S shows
the substitutions made to obtain V.
Examples
Define a second-order differential equation:
Convert the second-order differential equation to a system of first-order differential equations.
syms y(t)
eqn = diff(y,2) + y^2*t == 3*t;
V = odeToVectorField(eqn)V =
The elements of V represent the system of first-order differential equations, where V[i] = and . Here, the output V represents these equations:
For details on the relation between the input and output, see Algorithms.
When reducing the order of differential equations, return the substitutions that odeToVectorField makes by specifying a second output argument.
syms f(t) g(t) eqn1 = diff(g) == g-f; eqn2 = diff(f,2) == g+f; eqns = [eqn1 eqn2]; [V,S] = odeToVectorField(eqns)
V =
S =
The elements of V represent the system of first-order differential equations, where V[i] = . The output S shows the substitutions being made, S[1] = , S[2] = = diff(f), and S[3] = .
Solve a higher-order differential equation numerically by reducing the order of the equation, generating a MATLAB® function handle, and then finding the numerical solution using the ode45 function.
Convert the following second-order differential equation to a system of first-order differential equations by using odeToVectorField.
syms y(t)
eqn = diff(y,2) == (1-y^2)*diff(y)-y;
V = odeToVectorField(eqn)V =
Generate a MATLAB function handle from V by using matlabFunction.
M = matlabFunction(V,'vars',{'t','Y'})
M = function_handle with value:
@(t,Y)[Y(2);-(Y(1).^2-1.0).*Y(2)-Y(1)]
Specify the solution interval to be [0 20] and the initial conditions to be and . Solve the system of first-order differential equations by using ode45.
interval = [0 20]; yInit = [2 0]; ySol = ode45(M,interval,yInit);
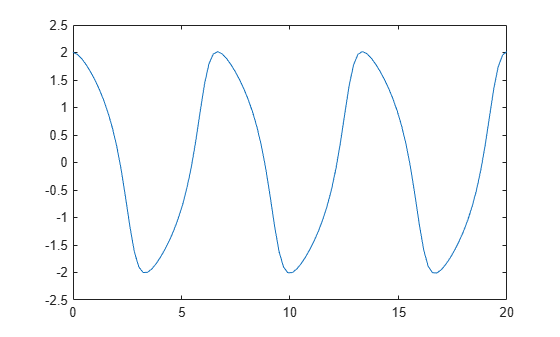
Next, plot the solution within the interval = [0 20]. Generate the values of t by using linspace. Evaluate the solution for , which is the first index in ySol, by calling the deval function with an index of 1. Plot the solution using plot.
tValues = linspace(0,20,100); yValues = deval(ySol,tValues,1); plot(tValues,yValues)
Convert the second-order differential equation with the initial condition to a first-order system.
syms y(x) a eqn = diff(y,x,2) == x; cond = y(0) == a; V = odeToVectorField(eqn,cond)
V =
Input Arguments
Output Arguments
Tips
To solve the resulting system of first-order differential equations, generate a MATLAB® function handle using
matlabFunctionwithVas an input. Then, use the generated MATLAB function handle as an input for the MATLAB numerical solverode23orode45.odeToVectorFieldcan convert only quasi-linear differential equations. That is, the highest-order derivatives must appear linearly. For example,odeToVectorFieldcan convert y*y″(t) = –t2 because it can be rewritten as y″(t) = –t2/y. However, it cannot convert y″(t)2 = –t2 or sin(y″(t)) = –t2.
Algorithms
To convert an nth-order differential equation
into a system of first-order differential equations, odetovectorfield makes
these substitutions.
Using the new variables, it rewrites the equation as a system of n first-order differential equations:
odeToVectorField returns the right sides
of these equations as the elements of vector V and
the substitutions made as the second output S.
Version History
Introduced in R2012aSee Also
dsolve | matlabFunction | odeFunction | ode23 | ode45