geostat
Geometric mean and variance
Syntax
Description
[
returns the mean m,v] = geostat(p)m and variance v of a geometric
distribution with the corresponding probability parameter in p. For
more information, see Geometric Distribution Mean and Variance.
Examples
Roll a fair die repeatedly until you successfully get a 6. The associated geometric distribution models the number of times you roll the die before the result is a 6. Determine the mean and variance of the distribution, and visualize the results.
Because the die is fair, the probability of successfully rolling a 6 in any given trial is p = 1/6. Compute the mean and variance of the geometric distribution.
p = 1/6; [m,v] = geostat(p)
m = 5.0000
v = 30.0000
Notice that the mean m is and the variance v is .
m2 = (1-p)/p
m2 = 5.0000
v2 = (1-p)/p^2
v2 = 30.0000
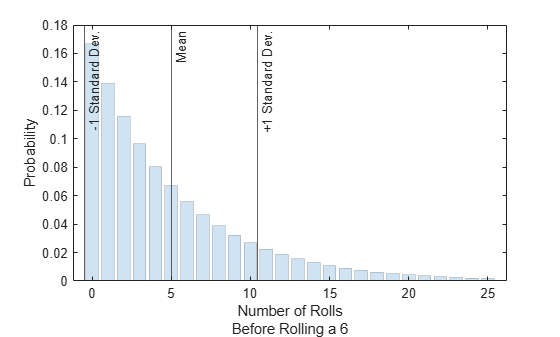
Evaluate the probability density function (pdf), or probability mass function (pmf), at the points x = 0,1,2,...,25.
rng("default") % For reproducibility x = 0:25; y = geopdf(x,p);
Plot the pdf values. Indicate the mean, one standard deviation below the mean, and one standard deviation above the mean.
bar(x,y,"FaceAlpha",0.2,"EdgeAlpha",0.2); xline([m-sqrt(v) m m+sqrt(v)],"-", ... ["-1 Standard Dev.","Mean","+1 Standard Dev."]) xlabel(["Number of Rolls","Before Rolling a 6"]) ylabel("Probability")
Create a probability vector that contains three different parameter values.
The first parameter corresponds to a geometric distribution that models the number of times you toss a coin before the result is heads.
The second parameter corresponds to a geometric distribution that models the number of times you roll a four-sided die before the result is a 4.
The third parameter corresponds to a geometric distribution that models the number of times you roll a six-sided die before the result is a 6.
p = [1/2 1/4 1/6];
Compute the mean and variance of each geometric distribution.
[m,v] = geostat(p)
m = 1×3
1.0000 3.0000 5.0000
v = 1×3
2.0000 12.0000 30.0000
The returned values indicate that, for example, the mean of a geometric distribution with probability parameter p = 1/4 is 3, and the variance of the distribution is 12.
Input Arguments
Output Arguments
More About
References
[1] Abramowitz, M., and I. A. Stegun. Handbook of Mathematical Functions. New York: Dover, 1964.
[2] Evans, M., N. Hastings, and B. Peacock. Statistical Distributions. 2nd ed., Hoboken, NJ: John Wiley & Sons, Inc., 1993.
Extended Capabilities
Version History
Introduced before R2006a