Automated Tuning Overview
The control system tuning tools such as systune and Control System
Tuner automatically tune control systems from high-level tuning goals you specify,
such as reference tracking, disturbance rejection, and stability margins. The software jointly
tunes all the free parameters of your control system regardless of control system architecture
or the number of feedback loops it contains. For example, the model of the following
illustration represents a multiloop control system for a helicopter.
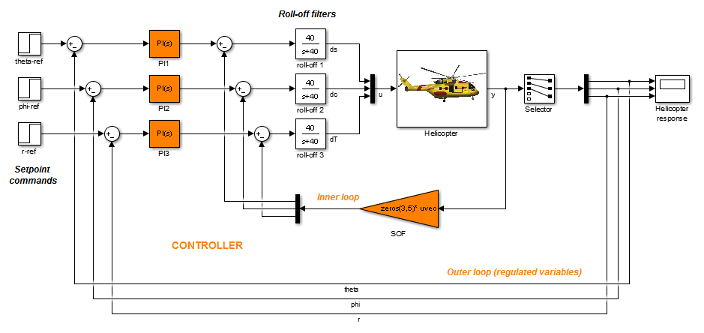
This control system includes a number of fixed elements, such
as the helicopter model itself and the roll-off filters. The inner
control loop provides static output feedback for decoupling. The outer
loop includes PI controllers for setpoint tracking. The tuning tools
jointly optimize the gains in the SOF and PI blocks
to meet setpoint tracking, stability margin, and other requirements
that you specify. These tools allow you to specify any control structure
and designate which blocks in your system are tunable.
Control systems are tuned to meet your specific performance and robustness goals subject to feasibility constraints such as actuator limits, sensor accuracy, computing power, or energy consumption. The library of tuning goals lets you capture these objectives in a form suitable for fast automated tuning. This library includes standard control objectives such as reference tracking, disturbance rejection, loop shapes, closed-loop damping, and stability margins. Using these tools, you can perform multi-objective tuning of control systems having any structure.
See Also
systune | Control System Designer