Choosing an Automated Tuning Approach
You can tune control systems at the MATLAB® command line or using the Control System Tuner app.
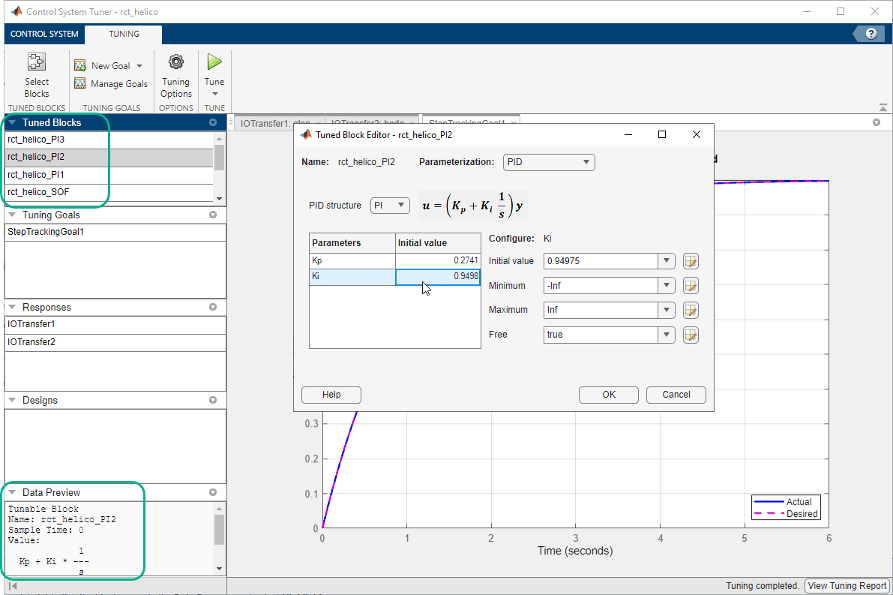
Control System Tuner provides an interactive graphical interface for specifying your tuning goals and validating the performance of the tuned control system.
Use Control System Tuner to tune control systems consisting of any number of
feedback loops, with tunable components having any structure (such as PID, gain block, or
state-space). You can represent your control architecture in MATLAB as a tunable generalized state-space (genss) model. If you
have Simulink®
Control Design™ software, you can tune a control system represented by a Simulink model. Use the graphical interface to configure your tuning goals, examine
response plots, and validate your controller design.
The systune command can perform all the same tuning tasks as Control
System Tuner. Tuning at the command line allows you to write scripts for repeated
tuning tasks. systune also provides advanced techniques such as tuning a
controller for multiple plants, or designing gain-scheduled controllers. To use the
command-line tuning tools, you can represent your control architecture in MATLAB as a tunable generalized state-space (genss) model. If you
have Simulink
Control Design software, you can tune a control system represented by a Simulink model using an slTuner interface. Use the
TuningGoal requirement objects to configure your tuning goals. Analysis
commands such as getIOTransfer and viewGoal let you
examine and validate the performance of your tuned system.
See Also
systune | Control System Designer