Saturation
Limit input signal to the upper and lower saturation values
Libraries:
Simulink /
Commonly Used Blocks
Simulink /
Discontinuities
HDL Coder /
Discontinuities
Description
The Saturation block produces an output signal that is the value of the input signal bounded to the upper and lower saturation values. The upper and lower limits are specified by the parameters Upper limit and Lower limit.
| Input | Output |
|---|---|
| Lower limit ≤ Input value ≤ Upper limit | Input value |
| Input value < Lower limit | Lower limit |
| Input value > Upper limit | Upper limit |
Examples
This example shows how the Quantizer and Saturation blocks are used in the model ex_sldemo_boiler. The ADC subsystem digitizes the input analog voltage by:
Multiplying the analog voltage by 256/5 with the Gain block
Rounding the value to integer floor with the Quantizer block
Limiting the output to a maximum of 255 (the largest unsigned 8-bit integer value) with the Saturation block

Extended Examples
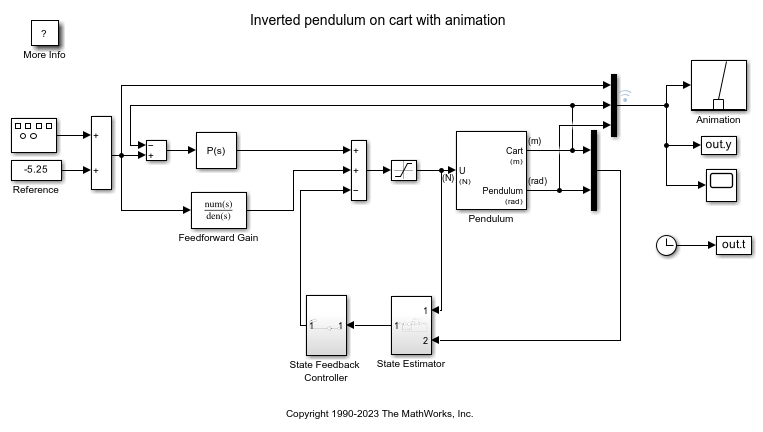
Inverted Pendulum with Animation
Use Simulink® to model and animate an inverted pendulum system. An inverted pendulum has its center of mass above its pivot point. To stably maintain this position, the system implements control logic to move the pivot point below the center-of mass as the pendulum starts to fall. The inverted pendulum is a classic dynamics problem used to test control strategies.
Ports
Input
Output
Parameters
Main
Specify the upper bound on the input signal. If the input signal is greater than this boundary, then the output signal is set to this saturation value. The Upper limit parameter is converted to the output data type using round-to-nearest and saturation. Upper limit must be greater than the Output minimum parameter and less than the Output maximum parameter.
Programmatic Use
Block Parameter:
UpperLimit |
| Type: character vector |
| Value: real scalar or vector |
Default:
'0.5' |
Specify the lower bound on the input signal. If the input signal is less than this boundary, then the output signal is set to this saturation value. The Lower limit parameter is converted to the output data type using round-to-nearest and saturation. Lower limit must be greater than the Output minimum parameter and less than the Output maximum parameter.
Programmatic Use
Block Parameter:
LowerLimit |
| Type: character vector |
| Value: real scalar or vector |
Default:
'-0.5' |
Select this parameter to cause the commands to treat the gain as 1. The linearization commands in Simulink® software treat this block as a gain in state space. Clear this parameter to have the commands treat the gain as 0.
Programmatic Use
Block Parameter:
LinearizeAsGain |
| Type: character vector |
Values: 'off' |
'on' |
Default: 'on' |
Select to enable zero-crossing detection. For more information, see Zero-Crossing Detection.
Programmatic Use
Block Parameter:
ZeroCross |
| Type: character vector | string |
Values: 'off' |
'on' |
Default: 'on' |
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SampleTime |
| Values: | "-1" (default) | scalar or vector in quotes |
Signal Attributes
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Lower value of the output range that the software checks.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMin |
| Values: | '[]' (default) | scalar in quotes |
Upper value of the output range that the software checks.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters) for some blocks.
Simulation range checking (see Specify Signal Ranges and Enable Simulation Range Checking).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation block instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | OutMax |
| Values: | '[]' (default) | scalar in quotes |
Choose the data type for the output. The type can be inherited,
specified directly, or expressed as a data type object such as a
Simulink.NumericType object. For more information,
see Control Data Types of Signals.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values: 'Inherit:
Same as input' | 'Inherit: Inherit via
back propagation' | 'double' |
'single' | 'int8' |
'uint8' | int16 |
'uint16' | 'int32' |
'uint32' | 'int64' |
'uint64' |
fixdt(1,16,0) |
fixdt(1,16,2^0,0) |
fixdt(1,16,2^0,0) | '<data
type expression>' |
Default: 'Inherit:
Same as input' |
Select this parameter to prevent the fixed-point tools from overriding the Output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | LockScale |
| Values: | 'off' (default) | 'on' |
Choose one of these rounding modes.
CeilingRounds both positive and negative numbers toward positive infinity. Equivalent to the MATLAB®
ceilfunction.ConvergentRounds number to the nearest representable value. If a tie occurs, rounds to the nearest even integer. Equivalent to the Fixed-Point Designer™
convergentfunction.FloorRounds both positive and negative numbers toward negative infinity. Equivalent to the MATLAB
floorfunction.NearestRounds number to the nearest representable value. If a tie occurs, rounds toward positive infinity. Equivalent to the Fixed-Point Designer
nearestfunction.RoundRounds number to the nearest representable value. If a tie occurs, rounds positive numbers toward positive infinity and rounds negative numbers toward negative infinity. Equivalent to the Fixed-Point Designer
roundfunction.SimplestAutomatically chooses between round toward floor and round toward zero to generate rounding code that is as efficient as possible.
ZeroRounds number toward zero. Equivalent to the MATLAB
fixfunction.
Programmatic Use
Block Parameter:
RndMeth |
| Type: character vector |
Values:
'Ceiling' |
'Convergent' |
'Floor' |
'Nearest' |
'Round' |
'Simplest' |
'Zero' |
Default:
'Floor' |
See Also
For more information, see Rounding Modes (Fixed-Point Designer).
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a