interp
Interpolation — increase sample rate by integer factor
Description
Examples
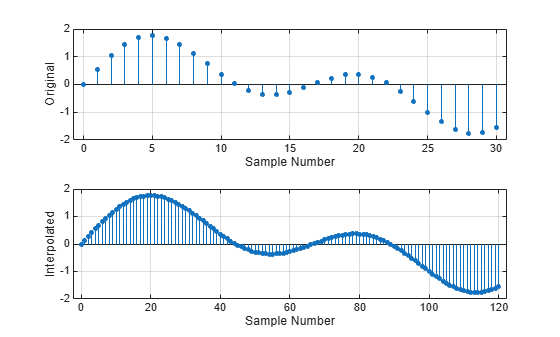
Create a sinusoidal signal sampled at 1 kHz. Interpolate it by a factor of four.
t = 0:1/1e3:1; x = sin(2*pi*30*t) + sin(2*pi*60*t); y = interp(x,4);
Plot the original and interpolated signals.
subplot(2,1,1) stem(0:30,x(1:31),'filled','MarkerSize',3) grid on xlabel('Sample Number') ylabel('Original') subplot(2,1,2) stem(0:120,y(1:121),'filled','MarkerSize',3) grid on xlabel('Sample Number') ylabel('Interpolated')
Input Arguments
Output Arguments
Algorithms
Interpolation increases the original sample rate of a sequence to a higher rate. It is
the opposite of decimation. interp inserts zeros into the original
signal and then applies a lowpass interpolating filter to the expanded sequence. The
function uses the lowpass interpolation algorithm 8.1 described in [1]:
Expand the input vector to the correct length by inserting 0s between the original data values.
Design a special symmetric FIR filter that allows the original data to pass through unchanged and interpolates to minimize the mean-square error between the interpolated points and their ideal values. The algorithm that
interpuses to design the interpolation filter depends on the data type of the input signalx:Single precision —
interpuses the frequency-domain least-squares algorithm onxto design the coefficients of the interpolation filter.Double precision —
interpuses the time-domain least-squares algorithm on a band-limited subspace ofxto design the coefficients of the interpolation filter. The function partitions the design of interpolation filters of order2*intor*(n+1)rpolyphase subfilters to enhance the computation performance.
Apply the filter to the expanded input vector to produce the output.
References
[1] Digital Signal Processing Committee of the IEEE Acoustics, Speech, and Signal Processing Society, eds. Programs for Digital Signal Processing. New York: IEEE Press, 1979.
[2] Oetken, G., Thomas W. Parks, and H. W. Schüssler. "New results in the design of digital interpolators." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-23, No. 3, June 1975, pp. 301–309.
Extended Capabilities
Version History
Introduced before R2006a