gimbal
Add gimbal to satellite, platform, or ground station
Description
gimbal( adds a default parent)Gimbal object to each
parent in the parent vector, which can be a satellite, a platform, or a
ground station. A gimbal can be added to satellites, platform, and ground stations, and
dynamically change orientation independent of the parent. Transmitters, receivers, and
conical sensors can be mounted on the gimbals.
gimbal(
adds gimbals to parents in parent,Name=Value)parent using additional parameters specified
by optional name-value pairs.
gim = gimbal(___) returns the
added gimbals in the row vector gim.
Examples
Create a satellite scenario with a start time of 15-June-2021 8:55:00 AM UTC and a stop time of five days later. Set the simulation sample time to 60 seconds.
startTime = datetime(2021,6,21,8,55,0);
stopTime = startTime + days(5);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 21-Jun-2021 08:55:00
StopTime: 26-Jun-2021 08:55:00
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
Add a satellite to the scenario using Keplerian orbital elements.
semiMajorAxis = 7878137; % meters eccentricity = 0; inclination = 50; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 50; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly)
sat =
Satellite with properties:
Name: Satellite 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Orbit: [1x1 matlabshared.satellitescenario.Orbit]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
OrbitPropagator: sgp4
MarkerColor: [0.059 1 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
Add a ground station, which represents the location to be photographed, to the scenario.
gs = groundStation(sc,Name="Location to Photograph", ... Latitude=42.3001,Longitude=-71.3504) % degrees
gs =
GroundStation with properties:
Name: Location to Photograph
ID: 2
Latitude: 42.3001 degrees
Longitude: -71.3504 degrees
Altitude: 0 meters
MinElevationAngle: 0 degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [1 0.4118 0.1608]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Add a gimbal to the satellite. You can steer this gimbal independently of the satellite.
g = gimbal(sat)
g =
Gimbal with properties:
Name: Gimbal 3
ID: 3
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Track the location to be photographed using the gimbal.
pointAt(g,gs);
Add a conical sensor to the gimbal. This sensor represents the camera. Set the field of view to 60 degrees.
camSensor = conicalSensor(g,MaxViewAngle=60)
camSensor =
ConicalSensor with properties:
Name: Conical sensor 4
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
MaxViewAngle: 60 degrees
Accesses: [1x0 matlabshared.satellitescenario.Access]
FieldOfView: [0x0 matlabshared.satellitescenario.FieldOfView]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Add access analysis to the conical sensor between the camera and the location to be photographed.
ac = access(camSensor,gs)
ac =
Access with properties:
Sequence: [4 2]
LineWidth: 3
LineColor: [0.3922 0.8314 0.0745]
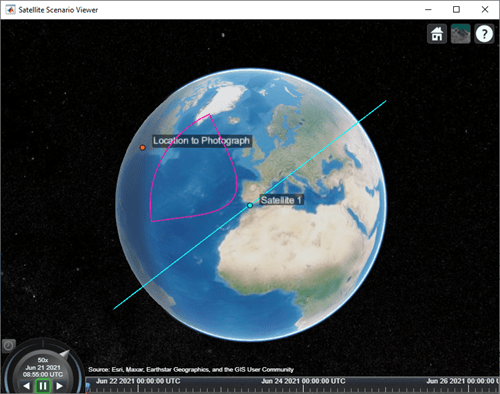
Visualize the field of view of the camera by using the Satellite Scenario Viewer.
v = satelliteScenarioViewer(sc); fieldOfView(camSensor);
Determine the intervals during which the camera can see the geographical site.
t = accessIntervals(ac)
t=35×8 table
"Conical sensor 4" "Location to Photograph" 1 21-Jun-2021 10:38:00 21-Jun-2021 10:55:00 1020 1 2
"Conical sensor 4" "Location to Photograph" 2 21-Jun-2021 12:36:00 21-Jun-2021 12:58:00 1320 2 3
"Conical sensor 4" "Location to Photograph" 3 21-Jun-2021 14:37:00 21-Jun-2021 15:01:00 1440 3 4
"Conical sensor 4" "Location to Photograph" 4 21-Jun-2021 16:41:00 21-Jun-2021 17:04:00 1380 5 5
"Conical sensor 4" "Location to Photograph" 5 21-Jun-2021 18:44:00 21-Jun-2021 19:07:00 1380 6 6
"Conical sensor 4" "Location to Photograph" 6 21-Jun-2021 20:46:00 21-Jun-2021 21:08:00 1320 7 7
"Conical sensor 4" "Location to Photograph" 7 21-Jun-2021 22:50:00 21-Jun-2021 23:04:00 840 8 8
"Conical sensor 4" "Location to Photograph" 8 22-Jun-2021 09:51:00 22-Jun-2021 10:02:00 660 13 13
"Conical sensor 4" "Location to Photograph" 9 22-Jun-2021 11:46:00 22-Jun-2021 12:07:00 1260 14 15
"Conical sensor 4" "Location to Photograph" 10 22-Jun-2021 13:46:00 22-Jun-2021 14:10:00 1440 15 16
"Conical sensor 4" "Location to Photograph" 11 22-Jun-2021 15:49:00 22-Jun-2021 16:13:00 1440 16 17
"Conical sensor 4" "Location to Photograph" 12 22-Jun-2021 17:53:00 22-Jun-2021 18:16:00 1380 18 18
"Conical sensor 4" "Location to Photograph" 13 22-Jun-2021 19:55:00 22-Jun-2021 20:18:00 1380 19 19
"Conical sensor 4" "Location to Photograph" 14 22-Jun-2021 21:58:00 22-Jun-2021 22:16:00 1080 20 20
⋮
Calculate the maximum revisit time in hours.
startTimes = t.StartTime;
endTimes = t.EndTime;
revisitTimes = hours(startTimes(2:end) - endTimes(1:end-1));
maxRevisitTime = max(revisitTimes) % hoursmaxRevisitTime = 12.666666666666666
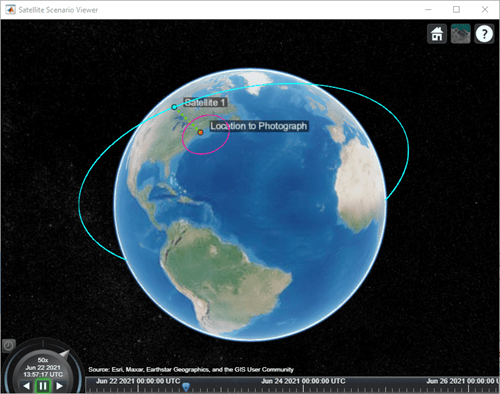
Visualize the revisit times that the camera photographs of the location.
play(sc);
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2021a
See Also
Objects
Functions
show|play|access|groundStation|satellite|conicalSensor|hide|platform