lutzLMSChannel
Description
The lutzLMSChannel
System object™ filters a real or complex input signal through a Lutz land mobile-satellite
(LMS) frequency-flat fading communication channel, as defined in [1].
To filter an input signal through a Lutz LMS time-varying channel:
Create the
lutzLMSChannelobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
chan = lutzLMSChannel
The default System object parameters are set to a scenario in which the mobile is moving at a constant speed of 3 km/hr on a highway with a conical spiral antenna operating at a 1.54 GHz carrier frequency and a satellite elevation angle of 34 degrees, as specified in [1].
chan = lutzLMSChannel(Name=Value)SampleRate=20e3 sets the input
signal sample rate to 20e3.
Properties
Usage
Description
[
produces path gains, pathgains,sampletimes,stateseries] = chan()pathgains, sample times,
sampletimes, and state series, stateseries for
a Lutz LMS frequency-flat fading channel.
In this case, the System object acts as a source of path gains, sample times, and state series.
Specify the duration of the fading process by using the NumSamples
property. Specify the data type of pathgains and
sampletimes using the OutputDataType property.
Note
This syntax is applicable when you set the ChannelFiltering property to false.
[
filters the input signal, y,pathgains,sampletimes,stateseries] = chan(x)x, through a Lutz LMS frequency-flat fading
channel, and returns the output channel-impaired signal in y, in
addition to the outputs in the previous syntax.
Note
This syntax is applicable when you set the ChannelFiltering property to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Define the channel configuration using a lutzLMSChannel System object and set the properties to these values.
Symbol rate: 4800 symbols/sec (Assume sample rate to be equal to symbol rate)
Product of the maximum Doppler frequency and symbol duration that indicates a normalized measure of channel state time variations (fd*T): 0.01
Rice factor (K-factor): 20 dB
Fading parameters of Rayleigh log-normal fading channel in bad state: mean (mu): -20.8 dB and standard deviation (sigma): -0.09 dB
Fading signal (Doppler Spectrum): Jakes model with sum of sinusoids technique (10 sinusoids)
Good state time-share parameter (X): 0.9
Mean duration of shadowing period (Ct): 10 sec
chan = lutzLMSChannel; chan.SampleRate = 4800; % Assuming same as symbol rate chan.MaximumDopplerShift = 48; % fd = 0.01/T = 0.01*SymbolRate chan.KFactor = 20; % Rice factor chan.LogNormalFading = [-20.8 -0.09]; % [mu sigma] chan.MeanStateDuration = [9 1]; % [X*Ct (1-X)*Ct]; chan.FadingTechnique = "Sum of sinusoids"; chan.NumSinusoids = 10;
Display the channel characteristics.
disp(chan)
lutzLMSChannel with properties:
SampleRate: 4800
InitialState: "Good"
KFactor: 20
LogNormalFading: [-20.8000 -0.0900]
StateDurationDistribution: "Exponential"
MeanStateDuration: [9 1]
MaximumDopplerShift: 48
ChannelFiltering: true
Show all properties
Model the Lutz LMS channel using the configuration entries from the Lutz IEEE paper (Table II), as defined in the IEEE Transactions on Vehicular Technology article (stated in the References section).
Define the channel configuration using a lutzLMSChannel System object and set the properties to these values.
Rician K-factor (k): 10.2
Fading parameters of Rayleigh log-normal fading channel in bad state: mean (mu): -8.9 dB and standard deviation (sig): 5.1 dB
Mean duration of good state, in meters (Dg): 90
Mean duration of bad state, in meters (Db): 29
Assume mobile speed is 10 km/hr at 1.54 GHz carrier frequency
v = 10; % Mobile speed in km/hr v_ms = (v*1000/3600); % Mobile speed in m/s fc = 1.54e9; % Carrier frequency in Hz c = physconst("lightspeed"); % Speed of light in m/s fd = v_ms/c*fc; % Mobile maximum Doppler frequency in Hz k = 10.2; % Rician K-factor in dB mu = -8.9; % Bad state mean sig = 5.1; % Bad state standard deviation % Get the mean state duration in seconds Dg = 90; % Mean duration of good state in m Db = 29; % Mean duration of bad state in m Dg_sec = Dg/v_ms; % Mean duration of good state in sec Db_sec = Db/v_ms; % Mean duration of bad state in sec chan = lutzLMSChannel; chan.MaximumDopplerShift = fd; chan.KFactor = k; chan.LogNormalFading = [mu sig]; chan.MeanStateDuration = [Dg_sec Db_sec];
Display the channel characteristics.
disp(chan)
lutzLMSChannel with properties:
SampleRate: 7680000
InitialState: "Good"
KFactor: 10.2000
LogNormalFading: [-8.9000 5.1000]
StateDurationDistribution: "Exponential"
MeanStateDuration: [32.4000 10.4400]
MaximumDopplerShift: 14.2691
ChannelFiltering: true
Show all properties
Create and Configure the Channel
Create a Lutz LMS channel using lutzLMSChannel System object.
Consider a scenario in which a mobile is moving with variable velocity and a maximum Doppler shift (fd) of 25 Hz. This is the behavior of the mobile during the scenario:
First 5 minutes: Good state with a Rice factor of 20 dB
Next 1 minutes: Good state with a Rice factor of 8 dB
Next 2 minutes: Bad state with the mean of fading level (mu) at -8 dB and standard deviation of fading level (sigma) at 2 dB
fd = 25; % In Hz TimeDurInMins = [5 1 2]; % In minutes TimeDurInSec = TimeDurInMins*60; % In seconds riceFactor = [20 8 nan]; % In dB mu = [nan nan -8]; % In dB sigma = [nan nan 2]; % In dB sampleRate = 1000; % In Hz state = ["Good" "Good" "Bad"];
Create the System object and configure its properties to these values.
Distribution type used for state duration: None
Random stream: mt19937ar with seed
Channel filtering: 0 (Disabled)
% Initialize the channel chan = lutzLMSChannel; chan.InitialState = "Good"; chan.StateDurationDistribution = "None"; chan.RandomStream = "mt19937ar with seed"; chan.ChannelFiltering = 0; chan.SampleRate = sampleRate; chan.MaximumDopplerShift = fd;
Display the channel characteristics.
disp(chan)
lutzLMSChannel with properties:
SampleRate: 1000
InitialState: "Good"
KFactor: 11.7000
LogNormalFading: [-8.8000 3.8000]
StateDurationDistribution: "None"
MeanStateDuration: [1800 14.4000]
MaximumDopplerShift: 25
ChannelFiltering: false
NumSamples: 7680
OutputDataType: "double"
Show all properties
Generate Lutz LMS Channel
Simulate the channel for all three cases of the scenario.
numChanges = length(TimeDurInSec); pathGainsT = cell(numChanges,1); stateSeriesT = cell(numChanges,1); sampleTimesT = cell(numChanges,1); % Run the channel across different cases for loopIdx = 1:length(TimeDurInSec) chan.InitialState = state(loopIdx); if strcmpi(chan.InitialState,"Good") chan.MeanStateDuration = [TimeDurInSec(loopIdx) 0]; chan.KFactor = riceFactor(loopIdx); else chan.MeanStateDuration = [0 TimeDurInSec(loopIdx)]; chan.LogNormalFading = [mu(loopIdx) sigma(loopIdx)]; end chan.NumSamples = round(sum(chan.MeanStateDuration)*chan.SampleRate); [pathGainsT{loopIdx},sampleTimesT{loopIdx},stateSeriesT{loopIdx}] = chan(); end % Convert cell to matrix pathGains = cell2mat(pathGainsT); sampleTimes = cell2mat(sampleTimesT); stateSeries = cell2mat(stateSeriesT);
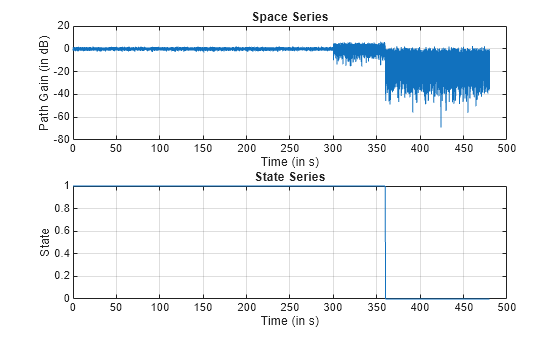
Visualize Space Series and State Series
Plot the space series as a function of time.
figure subplot(211) plot(sampleTimes,20*log10(abs(pathGains))) title("Space Series") xlabel("Time (in s)") ylabel("Path Gain (in dB)") grid on
Plot the state series as a function of time.
subplot(212) plot(sampleTimes,stateSeries) title("State Series") xlabel("Time (in s)") ylabel("State") grid on
Get channel information from a LutzLMSChannel System object by using the info object function.
Create a Lutz LMS channel System object and specify its properties.
chan = lutzLMSChannel; chan.SampleRate = 6000; chan.KFactor = 20; chan.MeanStateDuration = [8 2]; disp(chan)
lutzLMSChannel with properties:
SampleRate: 6000
InitialState: "Good"
KFactor: 20
LogNormalFading: [-8.8000 3.8000]
StateDurationDistribution: "Exponential"
MeanStateDuration: [8 2]
MaximumDopplerShift: 4.2807
ChannelFiltering: true
Show all properties
QPSK-modulate a random input signal, and then pass it through the channel.
numSamples = 2e4; txWaveform = pskmod(randi([0 3],numSamples,1),4); [rxWaveform,pathGains,sampleTimes,stateSeries] = chan(txWaveform);
Get the characteristic information about the Lutz LMS channel.
info(chan)
ans = struct with fields:
PathDelays: 0
ChannelFilterDelay: 0
ChannelFilterCoefficients: 1
NumSamplesProcessed: 20000
Transmit another QPSK-modulated random input signal through the channel.
numSamples2 = 3e4; txWaveform2 = pskmod(randi([0 3],numSamples2,1),4); [rxWaveform2,pathGains2,sampleTimes2,stateSeries2] = chan(txWaveform2);
Observe the change in number of samples processed.
info(chan)
ans = struct with fields:
PathDelays: 0
ChannelFilterDelay: 0
ChannelFilterCoefficients: 1
NumSamplesProcessed: 50000
References
[1] Lutz, E., D. Cygan, M. Dippold, F. Dolainsky, and W. Papke. “The Land Mobile Satellite Communication Channel-Recording, Statistics, and Channel Model.” IEEE Transactions on Vehicular Technology 40, no. 2 (May 1991): 375–86. https://doi.org/10.1109/25.289418.
Extended Capabilities
Version History
Introduced in R2022b