Encoder
Measure incremental position and direction of a rotating motor
Libraries:
Simulink Coder Support Package for BeagleBone Blue Hardware /
Sensors
Description
Add-On Required: This feature requires the Simulink Coder Support Package for BeagleBone Blue Hardware add-on.
The Encoder block outputs the tick count from a quadrature encoder on a rotating motor that is connected to BeagleBone® Blue. Every increment in the tick count from the encoder indicates that the motor is rotating clockwise. Every decrement in the tick count from the encoder indicates that the motor is rotating counterclockwise. The tick count total represents the incremental position of the rotating motor.
Using the Reset mode parameter in the Block Parameters dialog box, you can reset the encoder readings that the block outputs. For more information on reset modes, see Reset mode in Parameters.
During simulations without hardware, this block outputs zeros. See Block Produces Zeros or Does Nothing in Simulation.
Ports
Input
Output
Parameters
Select the channel on the hardware to which the encoder is connected.
This block supports three different reset modes.
No reset– The block outputs the total tick count read from the encoder.Reset at each sample time– The block outputs the number of ticks read from the encoder at the given sample time.Reset by external signal– When you set the Reset mode parameter toReset by external signal, an input port becomes available. In this mode, when the value of the signal at the input port is0, the block output is the same as in theNo resetmode. When the value of the signal at the input port is a nonzero value, the block output is the same as in theReset at each sample timemode.
For example, assume that the encoder wheel connected to the hardware has 90 slots. This means that, the encoder tick count is one for every 4 degrees of rotation. Assume that the block sample time is 1 second, and the tick count at time instant T = 0 is 0.
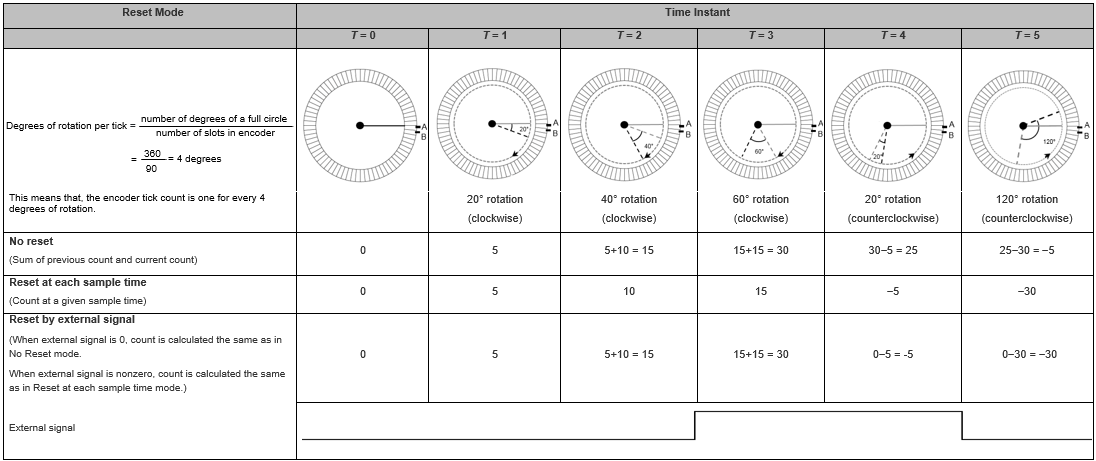
No reset– Between T = 0 and T = 1, the encoder rotates 20 degrees clockwise. Each tick represents 4 degrees, so the output is 20 / 4 =5.Between T = 1 and T = 2, the encoder rotates 40 degrees clockwise, so the output is
15at T = 2 (5 from T = 1 plus 10 from T = 2).In this mode, the block output at any time instant is the sum of the previous count and the current count.
Reset at each sample time– Between T = 0 and T = 1, the encoder rotates 20 degrees clockwise. The output is5.Between T = 1 and T = 2, the encoder rotates 40 degrees clockwise. The output is
10.Reset by external signal– From T = 0 to T = 2, the value of the input signal is0. During this period, the output is the same as in theNo resetmode. At T = 3 and T = 4, the value of the input signal changes to a nonzero value. During this period, output is the same as in theReset at each sample timemode.In the table, between T = 0 and T = 1, the encoder rotates 20 degrees clockwise. The output is
5at T = 1.Between T = 1 and T = 2, the encoder rotates 40 degrees clockwise. The output is
15at T = 2 (5 from T = 1 plus 10 from T = 2).Between T = 2 and T = 3, the encoder rotates 60 degrees in clockwise direction. The output is
30at T = 3 (15 from T = 2 plus 15 from T = 3).Between T = 3 and T = 4, the encoder rotates 20 degrees counterclockwise. At T = 3 the value of the input signal changes to a nonzero value. The output is
–5at T = 4 (0 from T = 3 plus –5 from T = 4).
Specify how often the block reads the tick count from the encoder, in seconds.
Dependencies
This parameter appears only when you set the Reset
mode parameter to No reset or
Reset at each sample time.
Version History
Introduced in R2017b