ROS Network Access
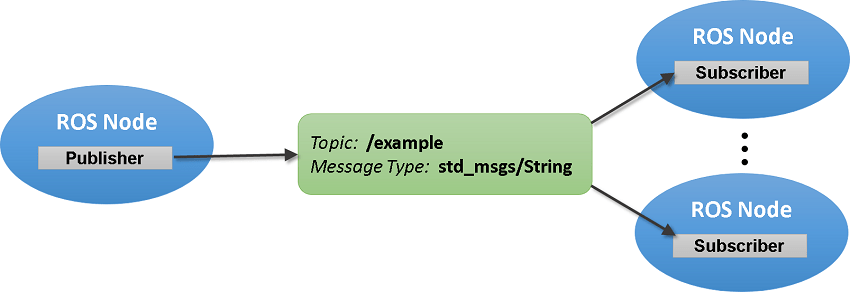
ROS Toolbox provides an interface to connect to existing ROS networks, or create ROS networks for desktop simulation and hardware interface with MATLAB and Simulink. You can create or access ROS nodes and establish communication between them using subscribers and publishers. You can also create or access ROS parameters and transformations on the network. For more information about ROS nodes, see Connect to ROS Network and Establish Communication.
You can create or access ROS service servers that can receive requests from service clients to perform tasks and provide responses. For more information about ROS services, see Explore ROS Services: Service Client and Service Server Guide.
You can also create and access ROS action servers that can receive goal execution request from action clients, and provide feedback during the goal execution process. For more information about ROS actions, see Explore ROS Actions: Action Client and Action Server Guide.
Categories
- ROS Network Connection and Exploration
Set up and interact with ROS networks
- ROS Network Access in MATLAB
Access ROS networks and messages using MATLAB
- ROS Network Access in Simulink
Access ROS networks and messages using Simulink
Featured Examples

Work with Basic ROS Messages
Create, explore, and populate ROS messages in MATLAB, that are commonly encountered in robotics applications.

Call and Provide ROS Services
Set up service servers to advertise a service to the ROS network.

Access the ROS Parameter Server
Add and retrieve parameters on the ROS parameter server.

Access the tf Transformation Tree in ROS
Access available coordinate frames, retrieve transformations between them, and transform points, vectors, and other entities between any two coordinate frames.

Work with Specialized ROS Messages
Handle message types for laser scans, uncompressed and compressed images, point clouds, camera info, occupancy grid, and octomap messages.
Exchange Data with ROS Publishers and Subscribers
Publish and subscribe to topics in a ROS network.