Current Time
Retrieve current ROS time or system time
Libraries:
ROS Toolbox /
ROS
Description
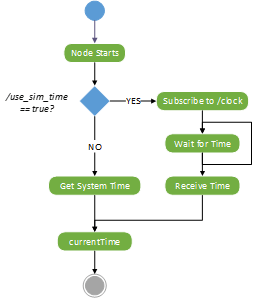
The Current Time block outputs the current ROS or system time. ROS Time is based on the system clock of your computer or the /clock topic being published on the ROS node.
Use this block to synchronize your simulation time with your connected ROS node.
If the use_sim_time ROS parameter is set to true, the block returns the simulation time published on the /clock topic. Otherwise, the block returns the system time of your machine.
Examples
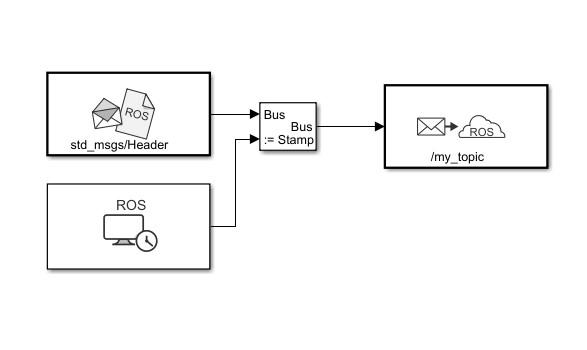
Time Stamp ROS Message Using Current Time in Simulink
Time stamp a ROS message with the current system time of your computer.
Ports
Output
Parameters
Tips
To set the
use_sim_timeparameters and get time from a/clocktopic:Connect to a ROS network, then use the Set Parameter block or set the parameter in the MATLAB® command window:
ptree = rosparam; set(ptree,'/use_sim_time',true)
Usually, the ROS node that publishes on the
/clocktopic sets up the parameter.
Extended Capabilities
Version History
Introduced in R2019b