Connect to ROS 2 Network and Establish Communication
ROS 2 Nodes
Nodes are the basic building blocks of ROS applications, which takes care of the computation. A ROS 2 network can have multiple nodes running on a single computer or across multiple computers. Nodes are independent processes that communicate with each other by sending and receiving messages. In a robot system, nodes include sensors (camera), motion controllers (motors), and algorithm components (route planner).
Initialize ROS 2 Network
To connect with a ROS 2 network, you can create a ROS 2 node. A ROS 2 network is identified
with a ROS Domain ID. To create a ROS 2
node in the default domain (with domain ID of 0), use ros2node command.
defaultNode = ros2node("/default_node")defaultNode =
ros2node with properties:
Name: '/default_node'
ID: 0
View ROS 2 Network Information
Use ros2 node list to view the network information on the default
domain.
ros2 node list
/default_node /node_1
Create ROS 2 Node on Different Domain
Pass the domain ID as a parameter to create a node in a domain other than the default one.
newDomainNode = ros2node("/new_domain_node",25)newDomainNode =
ros2node with properties:
Name: '/new_domain_node'
ID: 25
This will create a node and connect to the network with domain ID of 25.
Provide the domain ID as shown below for non-default domains.
ros2("node","list","DomainID",25)
/new_domain_node
Shutdown ROS 2 Network
Use clear to remove the reference to the node and remove the node from the network.
clear defaultNode clear newDomainNode
You can create multiple such nodes and establish communication between them by sending and receiving messages of different interface types.
Communication in ROS 2 Network
To connect to an existing ROS 2 network, create a node in the desired domain. The ROS 2 network automatically detects any new nodes created in the same domain which you studied in Discovery.
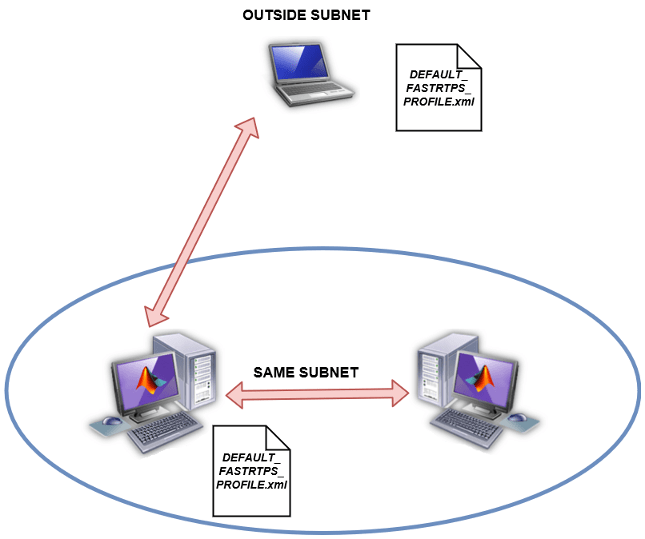
ROS 2 Communication Outside Subnet
A subnet is a logical partition of an IP network into multiple, smaller network segments. ROS 2 nodes can communicate with other nodes within the same subnet.
To detect nodes present outside the subnet, configure the DDS middleware used by
MATLAB® by creating a
DEFAULT_FASTRTPS_PROFILE.xml file.
Add the IP addresses of systems outside the subnet with which to communicate inside
the <address> elements. Note that for both systems to
communicate, they each must specify the other system's address in their respective
DEFAULT_FASTRTPS_PROFILE.xml files.
Set the domain ID element to the appropriate value for the network that is used for
communication.
Note
The required configuration depends on the DDS middleware implementation in use. MATLAB uses Fast DDS by default.
Keep this file in the MATLAB current working directory. Systems using ROS 2 outside MATLAB must place this file in the same directory from which the ROS 2 application is launched.
The code snippet below is an example of
DEFAULT_FASTRTPS_PROFILE.xml
file.
<?xml version="1.0" encoding="UTF-8" ?> <profiles> <participant profile_name="participant_win" is_default_profile="true"> <rtps> <builtin> <metatrafficUnicastLocatorList> <locator/> </metatrafficUnicastLocatorList> <initialPeersList> <locator> <udpv4> <address>192.34.17.36</address> </udpv4> </locator> <locator> <udpv4> <address>182.30.45.12</address> </udpv4> </locator> <locator> <udpv4> <address>194.158.78.29</address> </udpv4> </locator> </initialPeersList> </builtin> </rtps> </participant> </profiles>
ROS 2 advertises information to the nodes present in the systems with IP addresses listed
inside the DEFAULT_FASTRTPS_PROFILE.xml. If this file is not
present or does not contain the correct IP addresses, ROS 2 does not receive
information from nodes outside the subnet.
Troubleshoot ROS 2 Communication Across Remote Networks
Use these troubleshooting steps when MATLAB is unable to discover or communicate with ROS 2 nodes running on a remote machine or outside the local subnet.
![]() Verify ROS 2 Communication Between MATLAB and External Environment
Verify ROS 2 Communication Between MATLAB and External Environment
![]() Verify ROS 2 Distribution, ROS Domain ID, and ROS Middleware
Verify ROS 2 Distribution, ROS Domain ID, and ROS Middleware
![]() Solve ROS Middleware-Specific Issues
Solve ROS Middleware-Specific Issues
ROS 2 Communication Interfaces
You can communicate between ROS 2 nodes using different interface types: