ROS Toolbox System Requirements
To generate custom messages for ROS or ROS 2, or deploy ROS or ROS 2 nodes from MATLAB® or Simulink® software, you must build the necessary ROS or ROS 2 packages. To build these
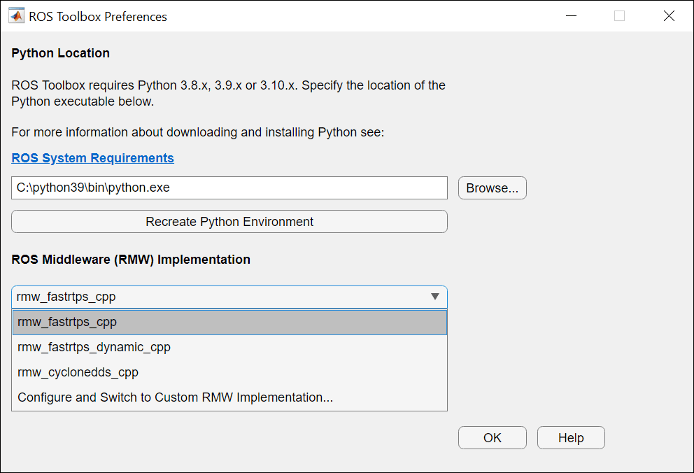
packages, you must have Python® software, CMake software, and a C++ compiler for your platform. To connect to ROS
and ROS 2 networks with the rosinit function, you must install and set up the
required version of Python.
To generate and deploy ROS or ROS 2 nodes from MATLAB or Simulink, you must also have a MATLAB Coder™ or Simulink Coder license respectively. To generate and deploy CUDA® optimized ROS or ROS 2, you must have a GPU Coder™ license.
Note
The nodes in MATLAB and Simulink software can still communicate with ROS or ROS 2 nodes in ROS or ROS 2 distributions that are not included in Recommended ROS and ROS 2 Distributions, only if the message definitions are the same.
Recommended ROS and ROS 2 Distributions
Release-wise Support for Recommended ROS and ROS 2 Distributions
| MATLAB Release | ROS Distribution | ROS 2 Distribution |
|---|---|---|
| R2025a to R2026a | Noetic Ninjemys | Jazzy Jalisco |
| R2023b to R2024b | Noetic Ninjemys | Humble Hawksbill |
| R2022a to R2023a | Noetic Ninjemys | Foxy Fitzroy |
| R2020b to R2021b | Melodic Morenia | Dashing Diademata |
| R2019b to R2020a | Indigo Igloo | Bouncy Bolson |
| R2016 to R2019a | Indigo Igloo | Not supported |
Third-party Software
Note
Starting R2022b, manual installation of CMake is not required.
Configure Python Environment
Release-wise Information to Configure Python Environment
| MATLAB Release | Configure Python Environment |
|---|---|
| R2022b and onwards | |
| Prior to R2022b |
Tips
ROS communication does not have built-in security, which means it can be exposed to risks like unauthorized access, eavesdropping, or data spoofing by undesired users. Additionally, nodes that join later may still access data that was transmitted earlier. To mitigate these risks, restrict ROS communication to trusted wired or wireless networks and implement robust network security practices, such as using the strongest authentication methods available. Additionally, download and use the secure version of your vendor’s communication framework, if available, and configure it to align with the latest security best practices.
Docker and Virtual Machine Installation and Setup
Install and set up the Virtual Machine image included with the ROS Toolbox, based on Ubuntu Linux and preconfigured to support the ROS examples in the ROS Toolbox. Use the Docker image included with the ROS Toolbox, which is also based on Ubuntu Linux and configured to support the ROS and ROS 2 examples in the ROS Toolbox.