loopsens
Sensitivity functions of plant-controller feedback loop
Syntax
Description
loops = loopsens(P,C)C in negative feedback with the plant
P. To compute the sensitivity functions for the system with positive
feedback, use loopsens(P,-C).
Examples
Consider PI controller for a dominantly first-order plant, with the closed-loop bandwidth of 2.5 rads/sec. Since the problem is SISO, all gains are the same at input and output.
gamma = 2; tau = 1.5; taufast = 0.1; P = tf(gamma,[tau 1])*tf(1,[taufast 1]); tauclp = 0.4; xiclp = 0.8; wnclp = 1/(tauclp*xiclp); KP = (2*xiclp*wnclp*tau - 1)/gamma; KI = wnclp^2*tau/gamma; C = tf([KP KI],[1 0]);
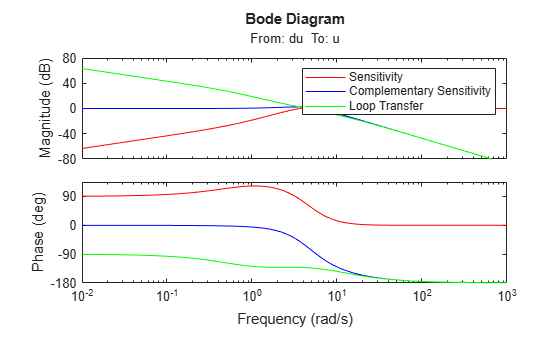
Form the closed-loop (and open-loop) systems with loopsens, and plot Bode plots of the sensitivity functions at the plant input.
loops = loopsens(P,C); bode(loops.Si,'r',loops.Ti,'b',loops.Li,'g') legend('Sensitivity','Complementary Sensitivity','Loop Transfer')
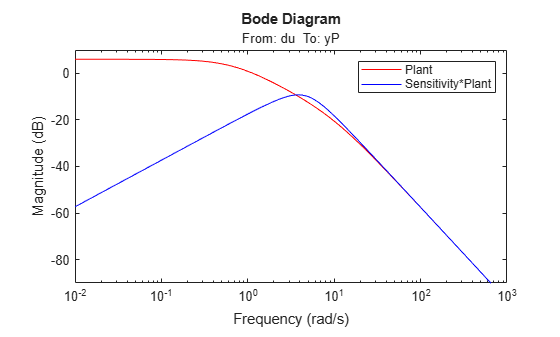
Finally, compare the open-loop plant gain to the closed-loop value of PSi.
bodemag(P,'r',loops.PSi,'b') legend('Plant','Sensitivity*Plant')
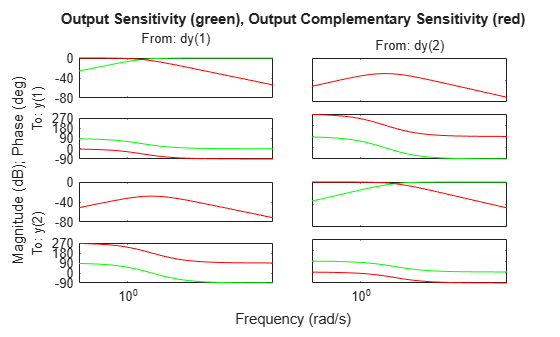
Consider an integral controller for a constant-gain, 2-input, 2-output plant. For purposes of illustration, the controller is designed via inversion, with different bandwidths in each rotated channel.
P = ss([2 3;-1 1]); BW = diag([2 5]); [U,S,V] = svd(P.d); % get SVD of Plant Gain Csvd = V*inv(S)*BW*tf(1,[1 0])*U'; % inversion based on SVD loops = loopsens(P,Csvd); bode(loops.So,'g',loops.To,'r',logspace(-1,3,120)) title('Output Sensitivity (green), Output Complementary Sensitivity (red)');
Input Arguments
Output Arguments
More About
The closed-loop interconnection structure shown below defines the
input/output sensitivity, complementary sensitivity, and loop transfer functions. The
structure includes multivariable systems in which P and
C are MIMO systems.
The following table gives the values of the input and output sensitivity functions for this control structure.
Description | Equation |
|---|---|
Input sensitivity Si (closed-loop transfer function from d1 to e1) | Si = (I + CP)–1 |
Input complementary sensitivity Ti (closed-loop transfer function from d1 to e2) | Ti = CP(I + CP)–1 |
Output sensitivity So (closed-loop transfer function from d2 to e3) | So = (I + PC)–1 |
Output complementary sensitivity To (closed-loop transfer function from d2 to e4) | To = PC(I + PC)–1 |
Input loop transfer function Li | Li = CP |
Output loop transfer function Lo | Lo = PC |
Version History
Introduced before R2006a
See Also
diskmargin | robstab | wcgain | wcdiskmargin