Get Transform
Get transform between body frames

Libraries:
Robotics System Toolbox /
Manipulator Algorithms
Description
The Get Transform block returns the homogeneous transformation between
body frames on the Rigid body tree robot model. Specify a rigidBodyTree object for the robot model, and select a source and target
body in the block.
The block uses Config, the robot configuration (joint positions) input, to calculate the transformation from the source body to the target body. This transformation is used to convert coordinates from the source to the target body. To convert to base coordinates, use the base body name as the Target body parameter.
Examples
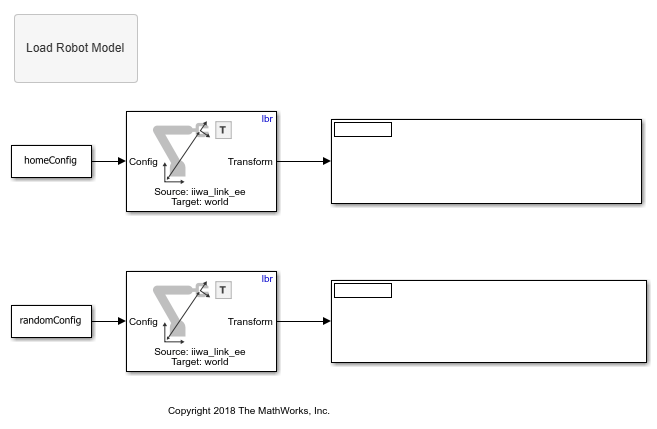
Get Transformations for Manipulator Bodies in Simulink
Get transformations for robot manipulators using a rigid body tree robot model passed to manipulator algorithm blocks in Simulink®.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a