phased.SteeringVector
Sensor array steering vector
Description
The SteeringVector System object creates steering
vectors for a sensor array for multiple directions and frequencies.
To compute the steering vector for an array for specified directions and frequency
Create the
phased.SteeringVectorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
steervec = phased.SteeringVectorsteervec, with default property values.
steervec = phased.SteeringVector(Name=Value)Name set to a specified
Value. You can specify additional name-value pair arguments in any
order as (Name1=Value1, …
,NameN=ValueN). Enclose each property name in
double quotes.
Example: steervec =
phased.SteeringVector(SensorArray=phased.URA,PropagationSpeed=physconst("LightSpeed"))
creates a steering vector object for a uniform rectangular array (URA) with default URA
property values and sets the propagation speed to the speed of light.
Properties
Usage
Description
SV = steervec(FREQ,ANG)SV, pointing in the directions specified
by ANG and for the operating frequencies specified in
FREQ. The meaning of SV depends on the
IncludeElementResponse property, as follows:
If
IncludeElementResponseistrue, the components ofSVinclude individual element responses.If
IncludeElementResponseisfalse, the computation assumes that the elements are isotropic andSVdoes not include the individual element responses. If the array contains subarrays,SVis the array factor among the subarrays. The phase center of each subarray is at its geometric center. If theSensorArrayproperty does not contain subarrays,SVis the array factor among the elements.
SV = steervec(FREQ,ANG,STEERANG)STEERANG. To use this
syntax, set the SensorArray property to an array type that contains
subarrays and set the IncludeElementResponse to
true. Arrays that contain subarrays include phased.PartitionedArray and the phased.ReplicatedSubarray. In this case, set the
SubarraySteering property of these arrays to either
"Phase" or "Time".
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Calculate and display the steering vector for a 4-element uniform linear array in the direction of 30 degrees azimuth and 20 degrees elevation. Assume the array's operating frequency is 300 MHz.
array = phased.ULA('NumElements',4); steervec = phased.SteeringVector('SensorArray',array); fc = 3e8; ang = [30; 20]; sv = steervec(fc,ang)
sv = 4×1 complex
-0.6011 - 0.7992i
0.7394 - 0.6732i
0.7394 + 0.6732i
-0.6011 + 0.7992i
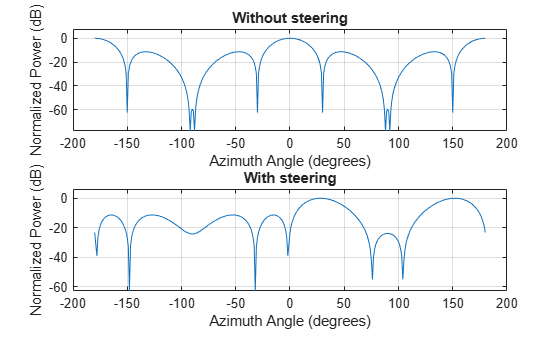
Calculate the steering vector for a 4-element uniform linear array (ULA) in the direction of 30 degrees azimuth and 20 degrees elevation. Assume the array operating frequency is 300 MHz.
fc = 300e6; c = physconst('LightSpeed'); array = phased.ULA('NumElements',4); steervec = phased.SteeringVector('SensorArray',array); sv = steervec(fc,[30;20]);
Plot the beam patterns for the uniform linear array when no steering vector is applied (steered broadside) and when a steering vector is applied.
subplot(211) pattern(array,fc,-180:180,0,'CoordinateSystem','rectangular', ... 'PropagationSpeed',c,'Type','powerdb') title('Without steering') subplot(212) pattern(array,fc,-180:180,0,'CoordinateSystem','rectangular', ... 'PropagationSpeed',c,'Type','powerdb','Weights',sv) title('With steering')
Calculate the steering vector for a uniform linear array in the direction of 30° azimuth and 20° elevation. Assume the array operates at 300 MHz.
array = phased.ULA('NumElements',2); steeringvector = phased.SteeringVector('SensorArray',array); fc = 300.0e6; ang = [30;20]; sv = steeringvector(fc,ang);
References
[1] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002.
Extended Capabilities
Version History
Introduced in R2011a
See Also
phased.ArrayGain | phased.ArrayResponse | phased.ElementDelay | uv2azel | phitheta2azel