assembleFEMatrices
Assemble finite element matrices
Syntax
Description
FEM = assembleFEMatrices(___,state)state structure array. The
function uses the time field of
the structure for time-dependent models and the
solution field u for nonlinear
models. You can use this argument with any of the
previous syntaxes.
Examples
Create a PDE model for the Poisson equation on an L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); specifyCoefficients(model,m=0,d=0,c=1,a=0,f=1); applyBoundaryCondition(model,"dirichlet", ... edge=1:model.Geometry.NumEdges, ... u=0);
Generate a mesh and obtain the default finite element matrices for the problem and mesh.
generateMesh(model,Hmax=0.2); FEM = assembleFEMatrices(model)
FEM = struct with fields:
K: [401×401 double]
A: [401×401 double]
F: [401×1 double]
Q: [401×401 double]
G: [401×1 double]
H: [80×401 double]
R: [80×1 double]
M: [401×401 double]
Make computations faster by specifying which finite element matrices to assemble.
Create an femodel object for steady-state thermal analysis and include the geometry of the built-in function squareg.
model = femodel(AnalysisType="thermalSteady", ... Geometry=@squareg);
Plot the geometry with the edge labels.
pdegplot(model,EdgeLabels="on")
xlim([-1.1 1.1])
ylim([-1.1 1.1])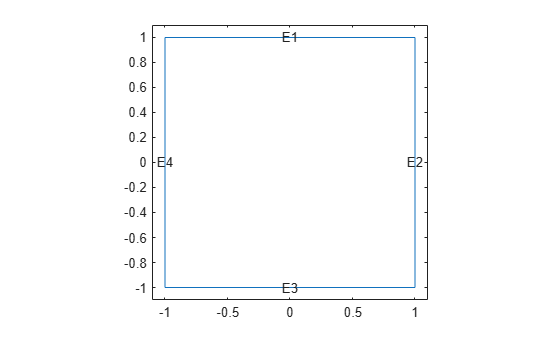
Specify the thermal conductivity of the material and the internal heat source.
model.MaterialProperties = ...
materialProperties(ThermalConductivity=0.2);
model.FaceLoad = faceLoad(Heat=10);Set the boundary conditions.
model.EdgeBC([1,3]) = edgeBC(Temperature=100);
Generate a mesh.
model = generateMesh(model);
Assemble the stiffness and mass matrices.
FEM_KM = assembleFEMatrices(model,"KM")FEM_KM = struct with fields:
K: [1529×1529 double]
M: [1529×1529 double]
Now, assemble the finite element matrices M, K, A, and F.
FEM_MKAF = assembleFEMatrices(model,"MKAF")FEM_MKAF = struct with fields:
M: [1529×1529 double]
K: [1529×1529 double]
A: [1529×1529 double]
F: [1529×1 double]
The four matrices M, K, A, and F correspond to discretized versions of the PDE coefficients m, c, a, and f. These four matrices also represent the domain of the finite-element model of the PDE. Instead of specifying them explicitly, you can use the domain argument.
FEMd = assembleFEMatrices(model,"domain")FEMd = struct with fields:
M: [1529×1529 double]
K: [1529×1529 double]
A: [1529×1529 double]
F: [1529×1 double]
The four matrices Q, G, H, and R, correspond to discretized versions of q, g, h, and r in the Neumann and Dirichlet boundary condition specification. These four matrices also represent the boundary of the finite-element model of the PDE. Use the boundary argument to assemble only these matrices.
FEMb = assembleFEMatrices(model,"boundary")FEMb = struct with fields:
H: [74×1529 double]
R: [74×1 double]
G: [1529×1 double]
Q: [1529×1529 double]
Create a PDE model for the Poisson equation on an L-shaped membrane with zero Dirichlet boundary conditions.
model = createpde; geometryFromEdges(model,@lshapeg); specifyCoefficients(model,m=0,d=0,c=1,a=0,f=1); applyBoundaryCondition(model,"dirichlet", ... Edge=1:model.Geometry.NumEdges, ... u=0);
Generate a mesh.
generateMesh(model,Hmax=0.2);
Obtain the finite element matrices after imposing the boundary condition using the null-space approach. This approach eliminates the Dirichlet degrees of freedom and provides a reduced system of equations.
FEMn = assembleFEMatrices(model,"nullspace")FEMn = struct with fields:
Kc: [321×321 double]
Fc: [321×1 double]
B: [401×321 double]
ud: [401×1 double]
M: [321×321 double]
Obtain the solution to the PDE using the nullspace finite element matrices.
un = FEMn.B*(FEMn.Kc\FEMn.Fc) + FEMn.ud;
Compare this result to the solution given by solvepde. The two solutions are identical.
u1 = solvepde(model); norm(un - u1.NodalSolution)
ans = 0
Obtain the finite element matrices after imposing the boundary condition using the stiff-spring approach. This approach retains the Dirichlet degrees of freedom, but imposes a large penalty on them.
FEMs = assembleFEMatrices(model,"stiff-spring")FEMs = struct with fields:
Ks: [401×401 double]
Fs: [401×1 double]
M: [401×401 double]
Obtain the solution to the PDE using the stiff-spring finite element matrices. This technique gives a less accurate solution.
us = FEMs.Ks\FEMs.Fs; norm(us - u1.NodalSolution)
ans = 0.0098
Assemble finite element matrices for the first and last time steps of a transient structural problem.
Create the geometry and plot a cylinder geometry.
gm = multicylinder(0.01,0.05);
addVertex(gm,Coordinates=[0,0,0.05]);
pdegplot(gm,FaceLabels="on",FaceAlpha=0.5)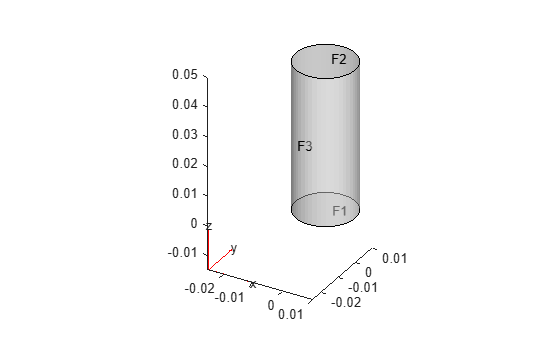
Create an femodel object for transient structural analysis and include the geometry in the model.
model = femodel(AnalysisType="structuralTransient", ... Geometry=gm);
Specify Young's modulus and Poisson's ratio.
model.MaterialProperties = ... materialProperties(YoungsModulus=201E9, ... PoissonsRatio=0.3, ... MassDensity=7800);
Specify that the bottom of the cylinder is a fixed boundary.
model.FaceBC(1) = faceBC(Constraint="fixed");Create a function specifying a harmonic pressure load.
function Tn = sinusoidalLoad(load,location,state,Frequency,Phase) if isnan(state.time) Tn = NaN*(location.nx); return end if isa(load,"function_handle") load = load(location,state); else load = load(:); end % Transient model excited with harmonic load Tn = load.*sin(Frequency.*state.time + Phase); end
Apply the harmonic pressure on the top of the cylinder.
Pressure = 5e7;
Frequency = 50;
Phase = 0;
pressurePulse = @(location,state) ...
sinusoidalLoad(Pressure,location,state,Frequency,Phase);
model.FaceLoad(2) = faceLoad(Pressure=pressurePulse);Specify the zero initial displacement and velocity.
model.CellIC = cellIC(Displacement=[0;0;0], ...
Velocity=[0;0;0]);Generate a linear mesh.
model = generateMesh(model,GeometricOrder="linear");Assemble the finite element matrices for the initial time step.
tlist = linspace(0,1,300); state.time = tlist(1); FEM_domain = assembleFEMatrices(model,state)
FEM_domain = struct with fields:
K: [6645×6645 double]
A: [6645×6645 double]
F: [6645×1 double]
Q: [6645×6645 double]
G: [6645×1 double]
H: [252×6645 double]
R: [252×1 double]
M: [6645×6645 double]
Pressure applied at the top of the cylinder is the only time-dependent quantity in the model. To model the dynamics of the system, assemble the boundary-load finite element matrix G for the initial, intermediate, and final time steps.
state.time = tlist(1);
FEM_boundary_init = assembleFEMatrices(model,"G",state)FEM_boundary_init = struct with fields:
G: [6645×1 double]
state.time = tlist(floor(length(tlist)/2));
FEM_boundary_half = assembleFEMatrices(model,"G",state)FEM_boundary_half = struct with fields:
G: [6645×1 double]
state.time = tlist(end);
FEM_boundary_final = assembleFEMatrices(model,"G",state)FEM_boundary_final = struct with fields:
G: [6645×1 double]
Assemble finite element matrices for a heat transfer problem with temperature-dependent thermal conductivity.
Create a 2-D geometry by drawing one rectangle the size of the block and a second rectangle the size of the slot.
r1 = [3 4 -.5 .5 .5 -.5 -.8 -.8 .8 .8]; r2 = [3 4 -.05 .05 .05 -.05 -.4 -.4 .4 .4]; gdm = [r1; r2]';
Subtract the second rectangle from the first to create the block with a slot.
g = decsg(gdm,'R1-R2',['R1'; 'R2']');
Create an femodel object for steady-state thermal analysis and include the geometry in the model.
model = femodel(AnalysisType="thermalSteady", ... Geometry=g);
Plot the geometry.
pdegplot(model,EdgeLabels="on");
axis([-.9 .9 -.9 .9]);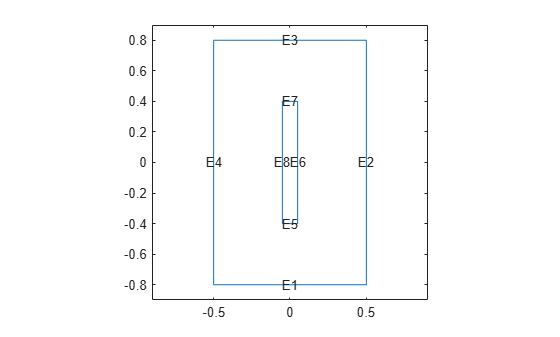
Set the temperature on the left edge to 100 degrees. Set the heat flux out of the block on the right edge to -10. The top and bottom edges and the edges inside the cavity are all insulated: there is no heat transfer across these edges.
model.EdgeBC(6) = edgeBC(Temperature=100); model.EdgeLoad(1) = edgeLoad(Heat=-10);
Specify the thermal conductivity of the material as a simple linear function of temperature u.
k = @(~,state) 0.7+0.003*state.u;
model.MaterialProperties = ...
materialProperties(ThermalConductivity=k);Specify the initial temperature.
model.FaceIC = faceIC(Temperature=0);
Generate a mesh.
model = generateMesh(model);
Calculate the steady-state solution.
Rnonlin = solve(model);
Because the thermal conductivity is nonlinear (depends on the temperature), compute the system matrices corresponding to the converged temperature. Assign the temperature distribution to the u field of the state structure array. Because the u field must contain a row vector, transpose the temperature distribution.
state.u = Rnonlin.Temperature.';
Assemble finite element matrices using the temperature distribution at the nodal points.
FEM = assembleFEMatrices(model,"nullspace",state)FEM = struct with fields:
Kc: [1285×1285 double]
Fc: [1285×1 double]
B: [1308×1285 double]
ud: [1308×1 double]
M: [1285×1285 double]
Compute the solution using the system matrices to verify that they yield the same temperature as Rnonlin.
u = FEM.B*(FEM.Kc\FEM.Fc) + FEM.ud;
Compare this result to the solution given by solve.
norm(u - Rnonlin.Temperature)
ans = 1.5868e-05