polygonDecomposition
Syntax
Description
polySet = polygonDecomposition(poly)
[___,
additionally specifies decomposition algorithm options, and returns any combination of
output arguments from previous syntaxes. To return a connectivity graph of the
nonoverlapping polygons from the decomposition as a field in the
solnInfo] = polygonDecomposition(poly,options)solnInfo output argument, the ReturnConnectivity
property of options must be true or
1.
Examples
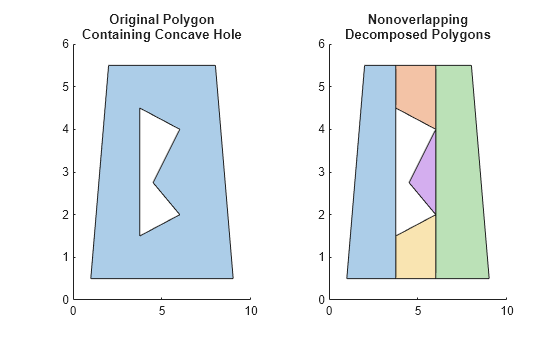
Load polygon vertices and use the vertices to create a polyshape object.
load("exampleSimplePolygonVertices.mat","verticesX","verticesY") p = polyshape(verticesX,verticesY);
Perform polygon decomposition with the default algorithm and options.
polySet = polygonDecomposition(p);
Plot the original polygon and the decomposed polygon side by side.
tiledlayout(1,2,TileSpacing="loose") nexttile plot(p) title(["Original Polygon","Containing Concave Hole"]) nexttile plot(polySet) title(["Nonoverlapping","Decomposed Polygons"])
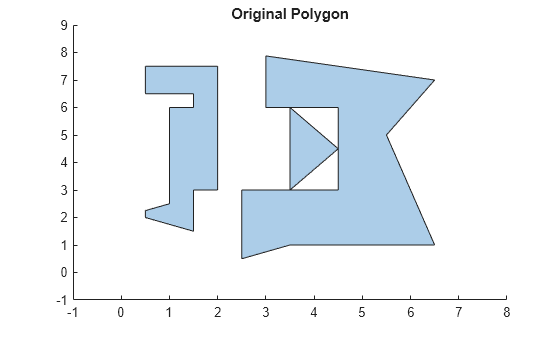
Load a polyshape and plot it.
load("exampleComplexPolyshape.mat","p") plot(p) title("Original Polygon")
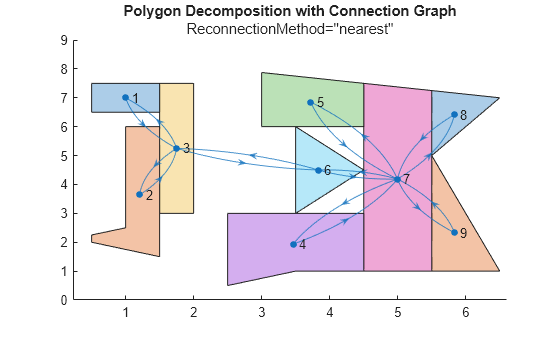
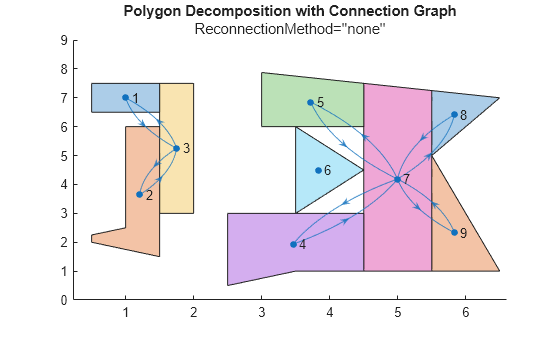
Decompose the polygon using each reconnection method.
bOpts1 = boustrophedonOptions(ReconnectionMethod="nearest"); [polySet1,info1] = polygonDecomposition(p,bOpts1); bOpts2 = boustrophedonOptions(ReconnectionMethod="none"); [polySet2,info2] = polygonDecomposition(p,bOpts2); bOpts3 = boustrophedonOptions(ReconnectionMethod="all"); [polySet3,info3] = polygonDecomposition(p,bOpts3);
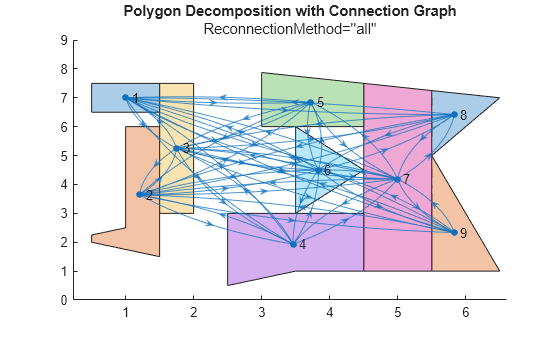
Show the polygon decomposition with a connectivity graph overlay for each reconnection method.
plot(polySet1) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet1,info1.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''nearest''") hold off
plot(polySet2) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet2,info2.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''none''"); hold off
plot(polySet3) hold on exampleHelperShowGraphConnectionsOnPolyset(polySet3,info3.Connectivity,0.5); title("Polygon Decomposition with Connection Graph"); subtitle("ReconnectionMethod=''all''"); hold off
This is the helper function for plotting the polygon decomposition and overlaying the connectivity graph.
function gHandle = exampleHelperShowGraphConnectionsOnPolyset(polySet,connectionGraph,lineWidth) % Get the current axes ax = gca; ax.ColorOrderIndex = 1; % Reset the color order index % Overlay the connectivity graph gHandle = show(connectionGraph); gHandle.EdgeAlpha = 0.75; gHandle.LineWidth = lineWidth; % Set the line width for the graph edges % Calculate and plot the centroids [cx,cy] = centroid(polySet); % Set the xy-positions of the connectivity graph to the centroids of % the polygons gHandle.XData = cx'; gHandle.YData = cy'; end
The polygonDecomposition function enables you to plan UAV coverage paths while accounting for areas that you do not need to include in coverage paths.
First, load the polygon as a polyshape representing the region to survey, and decompose the polygon into nonoverlapping convex polygons.
load("exampleCoveragePlanningPolyshape.mat","p") polySet = polygonDecomposition(p);
Extract vertices from each decomposed polygons, and store them in a cell array.
polygonVertices = cell(numel(polySet),1); for i = 1:numel(polySet) polygonVertices{i} = polySet(i).Vertices; end
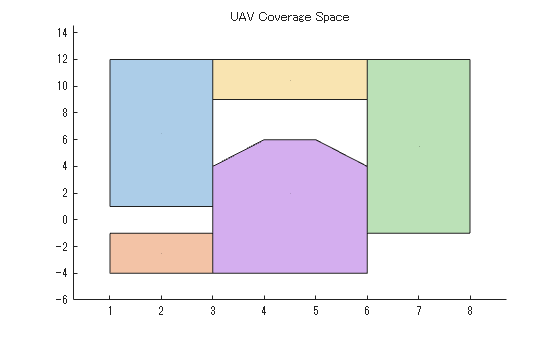
Create a uavCoverageSpace object with the decomposed polygon vertices, and visualize the coverage space.
space = uavCoverageSpace(Polygons=polygonVertices); ax = show(space,FontSize=1,LineWidth=0.25); title("UAV Coverage Space"); axis padded
space.UnitWidth = 0.4; % Sensor footprint widthCreate a uavCoveragePlanner object. Specify the takeoff and landing positions, and then plan the coverage path.
planner = uavCoveragePlanner(space); takeoff = [0 0 0]; landing = [0 -4 0]; path = plan(planner,takeoff,landing);
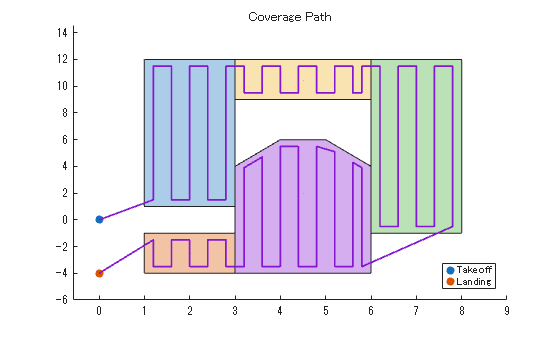
Visualize the planned path on the coverage space.
hold on ax.ColorOrderIndex=1; h1 = scatter(takeoff(1),takeoff(2),"filled"); h2 = scatter(landing(1),landing(2),"filled");
Plot the planned coverage path.
ax.ColorOrderIndex=4; plot(path(:,1),path(:,2),LineWidth=1.25) legend([h1 h2],"Takeoff","Landing",Location="southeast") title("Coverage Path") hold off
Input Arguments
Output Arguments
References
[1] Choset, Howie. "Coverage of Known Spaces: The Boustrophedon Cellular Decomposition." Autonomous Robots 9, no.3 (2000): 247–53. https://doi.org/10.1023/A:1008958800904.
Extended Capabilities
Version History
Introduced in R2025a