ekfSLAM
Perform simultaneous localization and mapping using extended Kalman filter
Since R2021b
Description
The ekfSLAM object performs simultaneous localization and mapping
(SLAM) using an extended Kalman filter (EKF). It takes in observed landmarks from the
environment and compares them with known landmarks to find associations and new landmarks. Use
the associations to correct the state and state covariance. The new landmarks are augmented in
the state vector.
Creation
Syntax
Description
slamObj = ekfSLAM
slamObj = ekfSLAM(Name,Value)
slamObj = ekfSLAM('MaxNumLandmark',N,Name,Value)N allowed in the
state vector when generating code. This limit on the number of landmarks applies only when
generating code.
slamObj = ekfSLAM('MaxNumLandmark',N,‘MaxNumPoseStored’,M,Name,Value)M along with the maximum
number of landmarks N in the state vector while generating code. These
limits apply only when generating code.
Properties
Object Functions
copy | Create deep copy of EKF SLAM object |
correct | Correct state and state error covariance |
landmarkInfo | Retrieve landmark information |
poseHistory | Retrieve corrected and predicted pose history |
predict | Predict state and state error covariance |
removeLandmark | Remove landmark from state vector |
reset | Reset state and state estimation error covariance |
Examples
Load a race track data set that contains the initial vehicle state, initial vehicle state covariance, process noise covariance, control input, time step size, measurement, measurement covariance, and validation gate values.
load("racetrackDataset.mat","initialState","initialStateCovariance", ... "processNoise","controllerInputs","timeStep", ... "measurements","measCovar","validationGate");
Create an ekfSLAM object with initial state, initial state covariance, and process noise.
ekfSlamObj = ekfSLAM("State",initialState, ... "StateCovariance",initialStateCovariance, ... "ProcessNoise",processNoise);
Initialize a variable to store the pose.
storedPose = nan(size(controllerInputs,1)+1,3); storedPose(1,:) = ekfSlamObj.State(1:3);
Predict the state using the control input and time step size for the state transition function. Then, correct the state using the data of the observed landmarks, measurement covariance, and validation gate for the data association function.
for count = 1:size(controllerInputs,1) % Predict the state predict(ekfSlamObj,controllerInputs(count,:),timeStep); % Get the landmarks in the environment observedLandmarks = measurements{count}; % Correct the state if ~isempty(observedLandmarks) correct(ekfSlamObj,observedLandmarks, ... measCovar,validationGate); end % Log the estimated pose storedPose(count+1,:) = ekfSlamObj.State(1:3); end
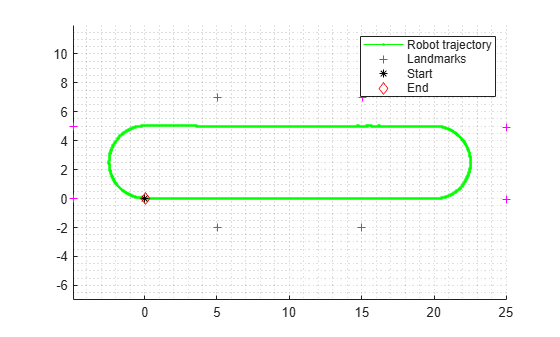
Visualize the created map.
fig = figure; figAx = axes(fig); axis equal grid minor hold on plot(figAx,storedPose(:,1),storedPose(:,2),"g.-") landmarks = reshape(ekfSlamObj.State(4:end),2,[])'; plot(figAx,landmarks(:,1),landmarks(:,2),"m+") plot(figAx,storedPose(1,1),storedPose(1,2),"k*") plot(figAx,storedPose(end,1),storedPose(end,2),"rd") legend("Robot trajectory","Landmarks","Start","End")
Extended Capabilities
Version History
Introduced in R2021b
See Also
Objects
Functions
copy|correct|landmarkInfo|poseHistory|predict|removeLandmark|reset