accelcal
Syntax
Description
[
returns matrix A,b] = accelcal(D)A and vector b used to correct
uncalibrated accelerometer measurements based on the calibration data
D.
After obtaining A and b, obtain the calibrated
data C from uncalibrated data U by using
C = U*A + b,
where U is a M-by-3 matrix and each row of
U is an uncalibrated accelerometer measurement.
Examples
Input Arguments
Output Arguments
More About
To obtain the measurement data for calibrating the accelerator, align the orientation of the accelerometer measurement frame (X-Y-Z) with one of the six orientations shown in this diagram. For example, to obtain an x-up measurement, align the positive-X direction of the accelerator measurement frame in the opposite direction of the gravity force as shown in the first figure.
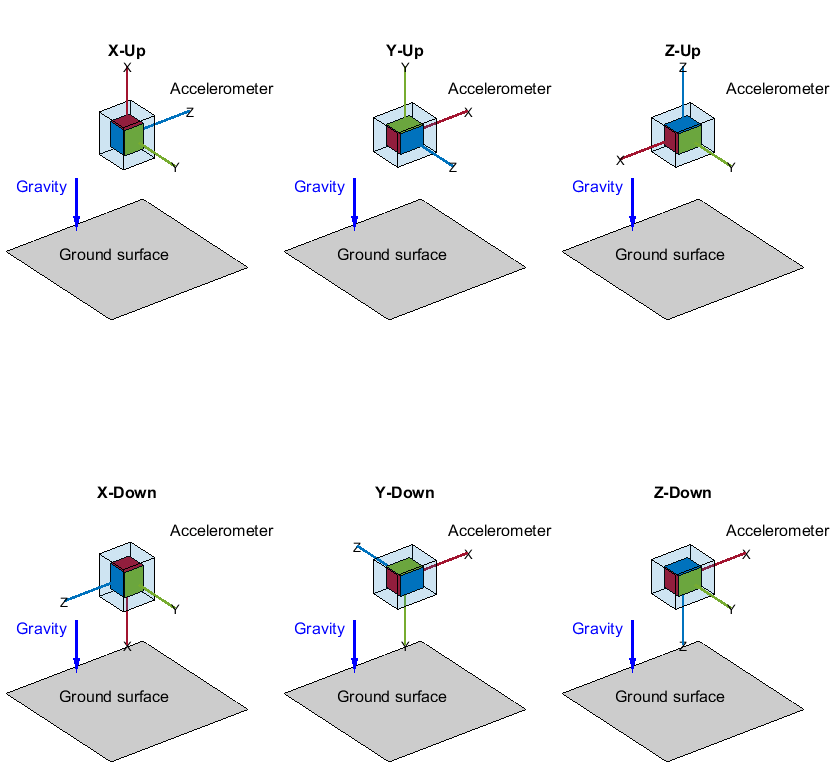
If the accelerometer does not have any calibration errors and its measurement frame is perfectly aligned as shown in the figure, you can obtain ideal measurements in this table.
| Orientation | aX | aY | aZ |
|---|---|---|---|
| X-Up | -g | 0 | 0 |
| X-Down | +g | 0 | 0 |
| Y-Up | 0 | -g | 0 |
| Y-Down | 0 | +g | 0 |
| Z-Up | 0 | 0 | -g |
| Z-Down | 0 | 0 | +g |
In the table, aX,
aY, and
aZ are the X-, Y-, and Z-acceleration
components, respectively. g is the local Earth gravity constant.
References
[1] AN4508 Application Note: Parameters and Calibration of a Low-G 3-Axis Accelerometer.
Version History
Introduced in R2023b