allpaths
Find all paths between two graph nodes
Description
[___] = allpaths(
specifies additional options using one or more name-value arguments. You can use any of the
output argument combinations in previous syntaxes. For example, you can specify
G,s,t,Name,Value)MaxNumPaths and a scalar to limit the number of paths returned.
Examples
Create an adjacency matrix for a complete graph with four nodes, and then create an undirected graph from the adjacency matrix. Plot the graph.
A = ones(4); G = graph(A); plot(G)
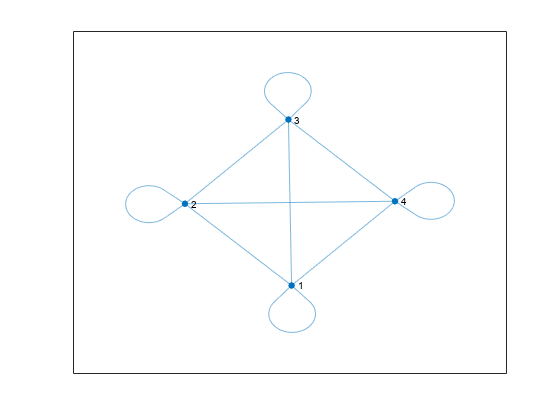
Calculate all paths in the graph that begin at node 1 and end at node 3.
paths = allpaths(G,1,3)
paths=5×1 cell array
{[ 1 2 3]}
{[1 2 4 3]}
{[ 1 3]}
{[1 4 2 3]}
{[ 1 4 3]}
The second output argument of allpaths returns the edges that are along each path. This is particularly useful for multigraphs, where the edge index is required to uniquely identify the edges on the path.
Create a directed multigraph with eight nodes and 18 edges. Specify names for the nodes. Plot the graph with labeled nodes and edges.
s = [1 1 2 2 3 3 2 2 4 6 8 6 6 7 3 3 5 3];
t = [2 3 1 3 2 1 4 4 6 2 6 7 8 8 5 5 7 7];
names = {'A','B','C','D','E','F','G','H'};
G = digraph(s,t,[],names);
p = plot(G,'EdgeLabel',1:numedges(G));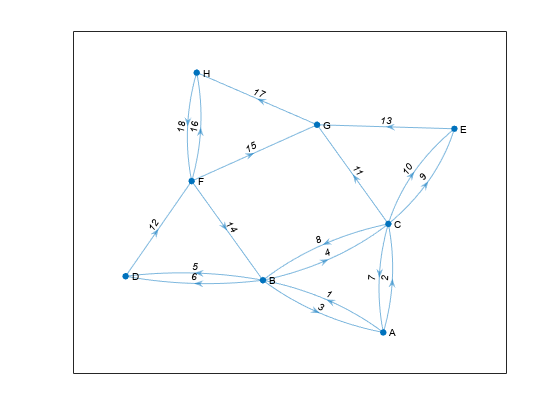
Calculate all paths between node A and node H. Specify two output arguments to also return the edge indices for edges along each path.
[paths,edgepaths] = allpaths(G,'A','H');
View the nodes and edges along the first path.
paths{1}ans = 1×6 cell
{'A'} {'B'} {'C'} {'E'} {'G'} {'H'}
edgepaths{1}ans = 1×5
1 4 9 13 17
Highlight the nodes and edges along the first path.
highlight(p,'Edges',edgepaths{1},'EdgeColor','r','LineWidth',1.5,'NodeColor','r','MarkerSize',6)

Use the 'MaxNumPaths', 'MaxPathLength', and 'MinPathLength' options to limit the number of paths returned by allpaths.
Create an adjacency matrix for a complete graph with 20 nodes. Create an undirected graph from the adjacency matrix, omitting self-loops.
A = ones(20);
G = graph(A,'omitselfloops');Since all of the nodes in the graph are connected to all other nodes, there are a large number of paths in the graph between any two nodes (more than 1.7e16). Therefore, it is not feasible to calculate all of the paths between two nodes since the results will not fit in memory. Instead, calculate the first 10 paths from node 2 to node 5.
paths1 = allpaths(G,2,5,'MaxNumPaths',10)paths1=10×1 cell array
{[ 2 1 3 4 5]}
{[ 2 1 3 4 6 5]}
{[ 2 1 3 4 6 7 5]}
{[ 2 1 3 4 6 7 8 5]}
{[ 2 1 3 4 6 7 8 9 5]}
{[ 2 1 3 4 6 7 8 9 10 5]}
{[ 2 1 3 4 6 7 8 9 10 11 5]}
{[ 2 1 3 4 6 7 8 9 10 11 12 5]}
{[ 2 1 3 4 6 7 8 9 10 11 12 13 5]}
{[2 1 3 4 6 7 8 9 10 11 12 13 14 5]}
Now calculate the first 10 paths between node 2 and node 5 that have a path length less than or equal to 2.
paths2 = allpaths(G,2,5,'MaxNumPaths',10,'MaxPathLength',2)
paths2=10×1 cell array
{[ 2 1 5]}
{[ 2 3 5]}
{[ 2 4 5]}
{[ 2 5]}
{[ 2 6 5]}
{[ 2 7 5]}
{[ 2 8 5]}
{[ 2 9 5]}
{[2 10 5]}
{[2 11 5]}
Finally, calculate the first 10 paths between node 2 and node 5 that have a path length greater than or equal to 3.
paths3 = allpaths(G,2,5,'MaxNumPaths',10,'MinPathLength',3)
paths3=10×1 cell array
{[ 2 1 3 4 5]}
{[ 2 1 3 4 6 5]}
{[ 2 1 3 4 6 7 5]}
{[ 2 1 3 4 6 7 8 5]}
{[ 2 1 3 4 6 7 8 9 5]}
{[ 2 1 3 4 6 7 8 9 10 5]}
{[ 2 1 3 4 6 7 8 9 10 11 5]}
{[ 2 1 3 4 6 7 8 9 10 11 12 5]}
{[ 2 1 3 4 6 7 8 9 10 11 12 13 5]}
{[2 1 3 4 6 7 8 9 10 11 12 13 14 5]}
Input Arguments
Name-Value Arguments
Output Arguments
More About
Tips
The number of paths in a graph depends heavily on the structure of the graph. For some graph structures, the number of paths can grow exponentially with the number of nodes. For example, a complete graph with 12 nodes given by
G = graph(ones(12))contains nearly 10 million paths between any two of its nodes. Use theMaxNumPaths,MaxPathLength, andMinPathLengthname-value pairs to control the output ofallpathsin these cases.
Version History
Introduced in R2021a