show
Description
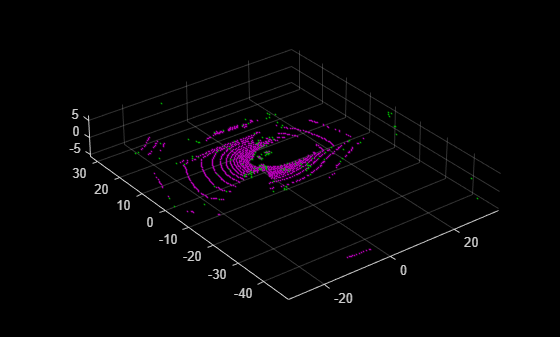
show( displays the edge and surface
points contained in the input lidar odometry and mapping (LOAM) map. The function displays
surface points in magenta and edge points in green.loamMap)
show(
specifies options using one or more name-value argument. For example,
loamMap,Name=Value)MarkerSize=5 sets the diameter size of the marker to
5 points.
ax = show(___)
Examples
Create a LOAM map to store LOAM feature points.
voxelSize = 0.5; loamMap = pcmaploam(voxelSize);
Load point cloud data into the workspace.
ld = load("drivingLidarPoints.mat");Detect LOAM feature points.
points = detectLOAMFeatures(ld.ptCloud);
Add the LOAM points to the map.
absPose = rigidtform3d; addPoints(loamMap,points,absPose)
Visualize the points in the LOAM map.
show(loamMap)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022b