pcBboxOversample
Description
augmentedPcBoxLabels = pcBboxOversample(pcBoxLabels,sampleData,classNames,totalObjects)pcBoxLabels by inserting
objects with specified class names classNames from the training data
datastore sampleData.
Examples
Load a point cloud and its class labels into the workspace.
dataLocation = fullfile(toolboxdir("lidar"),"lidardata", ... "sampleWPIPointClouds","pointClouds"); load("sampleWPILabels.mat","trainLabels");
Create a datastore for training data.
pcds = fileDatastore(dataLocation,"ReadFcn",@(x) pcread(x));
blds = boxLabelDatastore(trainLabels);
trainingData = combine(pcds,blds);Define the class names to sample from the input data. Use the sampleLidarData function to sample the corresponding bounding boxes.
classNames = {'car'};
[pcdsSampled,bldsSampled] = sampleLidarData(trainingData,classNames,Verbose=false);
cdsSampled = combine(pcdsSampled,bldsSampled);Read a point cloud from the training data.
pcBoxLabels = read(trainingData);
figure
pcshow(pcBoxLabels{1,1}.Location)
showShape(cuboid=pcBoxLabels{1,2},Opacity=0.1, ...
Color="yellow",LineWidth=0.5);
title("Original Point Cloud")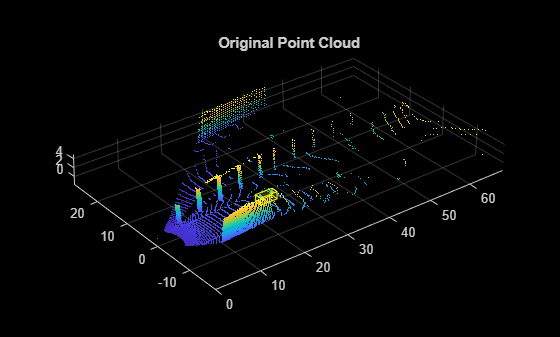
Augment the point cloud data pcBoxLabels with points sampled from the datastore cdsSampled using the pcBboxOversample function. Specify the total number of objects in the augmented class of the output point cloud using the totalObjects argument.
totalObjects = 5;
augmentedPcBoxLabels = pcBboxOversample(pcBoxLabels,cdsSampled,classNames,totalObjects);
figure
pcshow(augmentedPcBoxLabels{1,1}.Location)
showShape(cuboid=augmentedPcBoxLabels{1,2},Opacity=0.1, ...
Color="yellow",LineWidth=0.5);
title("Augmented Point Cloud")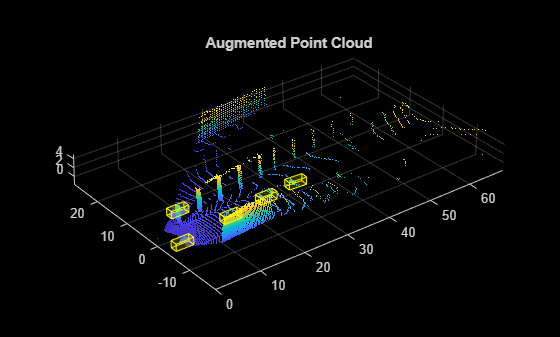
Input Arguments
Output Arguments
Algorithms
Lidar object detection techniques directly predict 3-D bounding boxes around objects of interest. Data augmentation helps you improve prediction accuracy and avoid overfitting issues while training.
You can perform ground truth data augmentation on point clouds using these steps.
Sample 3-D bounding boxes and the corresponding points from input training data using the
sampleLidarDatafunction.Augment a point cloud randomly with the sampled bounding boxes by using the
pcBboxOversamplefunction. The function performs a collision test on the sampled boxes and the ground truth boxes of the input point cloud to avoid overlap.
This technique alleviates the class imbalance problem in lidar object detection.
Version History
Introduced in R2022a