transformPointsForward
Description
Examples
Load an organized lidar point cloud from a MAT file.
ld = load("drivingLidarPoints.mat");
ptCloud = ld.ptCloud;Detect LOAM feature points.
points = detectLOAMFeatures(ptCloud);
Define a rigid transformation object.
tform = rigidtform3d([0 0 0],[2 1 4]);
Transform the LOAM feature points.
tformedPoints = transformPointsForward(points,tform);
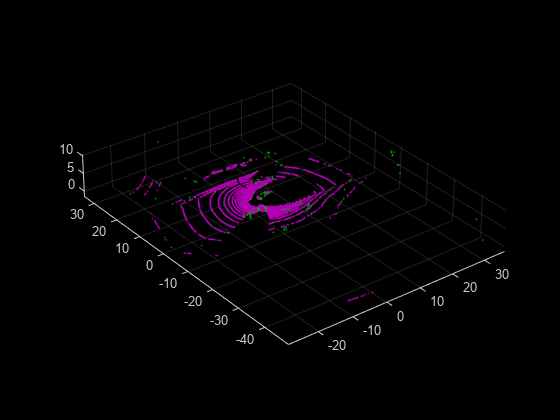
Visualize the transformed LOAM points.
figure show(tformedPoints)