detectLOAMFeatures
Description
points = detectLOAMFeatures(ptCloudOrg)
points = detectLOAMFeatures(ptCloudOrg,Name=Value)NumRegionsPerLaser=6 sets the number of regions to
split each laser scan to 6. Unspecified arguments have default
values.
Examples
Load an organized lidar point cloud from a MAT file into the workspace.
ld = load("drivingLidarPoints.mat");
ptCloudOrg = ld.ptCloud;Detect lidar odometry and mapping (LOAM) feature points.
points = detectLOAMFeatures(ptCloudOrg);
Visualize the LOAM points.
figure show(points)

Read point cloud data from a Velodyne PCAP file into the workspace.
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
Read the first point cloud from the data. Use this point cloud as the fixed point cloud.
fixedPtCloud = readFrame(veloReader,1);
Detect LOAM feature points in the fixed point cloud.
fixedPoints = detectLOAMFeatures(fixedPtCloud);
Downsample the less planar surface points from the fixed point cloud, to improve registration speed.
gridStep = 1; fixedPoints = downsampleLessPlanar(fixedPoints,gridStep);
Read and detect LOAM feature points from the fifth point cloud in the data. Use this point cloud as the moving point cloud.
movingPtCloud = readFrame(veloReader,5); movingPoints = detectLOAMFeatures(movingPtCloud);
Downsample the less planar surface points from the moving point cloud.
movingPoints = downsampleLessPlanar(movingPoints,gridStep);
Register the moving point cloud to the fixed point cloud.
tform = pcregisterloam(movingPoints,fixedPoints);
Transform the moving point cloud to align it to the fixed point cloud.
alignedPtCloud = pctransform(movingPtCloud,tform);
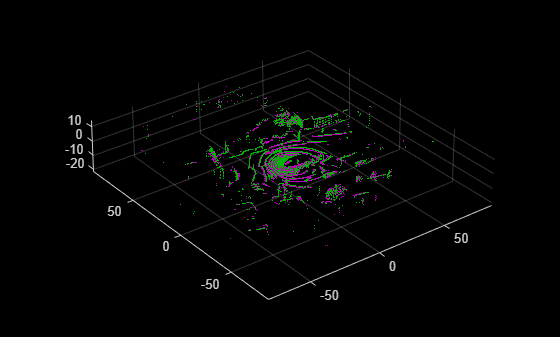
Visualize the aligned point clouds. Points from the fixed point cloud display as green, while points from the moving point cloud display as magenta.
figure pcshowpair(alignedPtCloud,fixedPtCloud)
Create a velodyneFileReader object.
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
Read first and fifth point clouds.
fixedPtCloud = readFrame(veloReader,1); movingPtCloud = readFrame(veloReader,5);
Detect LOAM feature points.
fixedPoints = detectLOAMFeatures(fixedPtCloud); movingPoints = detectLOAMFeatures(movingPtCloud);
Create point cloud objects with the LOAM points.
fixedPtCloudLoam = pointCloud(fixedPoints.Location); movingPtCloudLoam = pointCloud(movingPoints.Location);
Register the point clouds.
tform = pcregistericp(movingPtCloudLoam,fixedPtCloudLoam);
Transform the moving point cloud to align it to the fixed point cloud.
alignedPtCloud = pctransform(movingPtCloud,tform);
Visualize the aligned point clouds.
figure pcshowpair(alignedPtCloud,fixedPtCloud)

Input Arguments
Name-Value Arguments
Output Arguments
Tips
Because LOAM feature point detection supports only organized point clouds, convert an unorganized point cloud into an organized point cloud by using the
pcorganizefunction.The LOAM algorithm relies on the neighborhood of each point to compute its curvature and identify which points are on the boundaries of occluded regions. These points are considered unreliable points. Because of this unreliability, any preprocessing steps to the point clouds prior to feature point detection is not recommended.
You can increase registration accuracy by increasing the maximum total number of feature points the function can detect. To increase the total number of feature points, increase the value of one or more of the
MaxSharpEdgePoints,MaxLessSharpEdgePoints, andMaxPlanarSurfacePointsarguments. Note that this can also decrease the processing speed.
Algorithms
The feature point detection algorithm supports VLP-16, HDL-32, and other spinning lidar sensors also known as surround sensors.
The laser ID of each point corresponds to the laser that detects the point. For organized point clouds used with this algorithm, the
pointCloudLocationproperty stores the collected points as an M-by-N-by-3 matrix. Each row M represents a separate laser scan with N number of points, and 3 represents the x,y,z coordinates for each point.The algorithm uses the laser ID for point detection in
detectLOAMFeaturesand for point matching inpcregisterloam.
References
[1] Zhang, Ji, and Sanjiv Singh. “LOAM: Lidar Odometry and Mapping in Real-Time.” In Robotics: Science and Systems X. Robotics: Science and Systems Foundation, 2014. https://doi.org/10.15607/RSS.2014.X.007.
Extended Capabilities
Version History
Introduced in R2022a