downsampleLessPlanar
Description
pointsOut = downsampleLessPlanar(pointsIn,gridStep)pointsIn using a box grid
filter with 3-D boxes of the specified size gridStep. The function
merges input points within the same box to a single point in the output.
To speed up LOAM registration, downsample the less planar surface points using the
downsampleLessPlanar function, then register the LOAM points using the
pcregisterloam
function.
Examples
Load an organized lidar point cloud into the MATLAB® workspace from a MAT file.
ld = load("drivingLidarPoints.mat");
ptCloud = ld.ptCloud;Detect LOAM feature points in the point cloud.
points = detectLOAMFeatures(ptCloud);
Downsample the less planar surface points.
gridStep = 0.5; pointsOut = downsampleLessPlanar(points,gridStep);
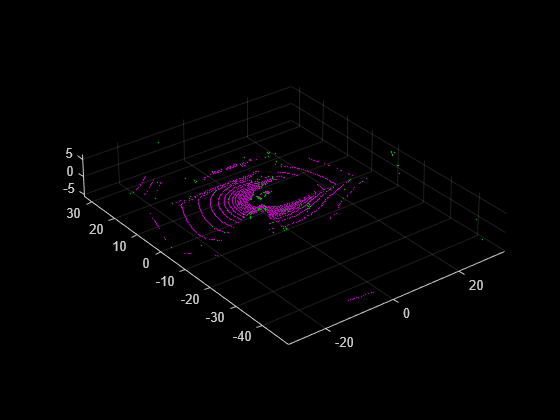
Visualize the downsampled LOAM points.
figure show(pointsOut)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022a