readPointCloud
Description
ptCloud = readPointCloud(e57Reader,ptCloudNum)ptCloudNum
from the E57 file specified by the e57FileReader
object e57Reader.
[
returns the metadata of the point cloud read from the file using all input arguments from
the previous syntax.ptCloud,pcMetadata] = readPointCloud(___)
Examples
Download a ZIP file containing an E57 file, and then unzip the file.
zipFile = matlab.internal.examples.downloadSupportFile("lidar","data/e57ParkingLot.zip"); saveFolder = fileparts(zipFile); e57FileName = [saveFolder filesep 'parkingLot.e57']; if ~exist(e57FileName,"file") unzip(zipFile,saveFolder) end
Create an e57FileReader object using the downloaded E57 file.
e57Reader = e57FileReader(e57FileName);
Define a variable for storing point clouds, ptCloudArr and their corresponding poses, tformArr.
ptCloudArr = []; tformArr = [];
Read the point cloud data.
for i = 1:e57Reader.NumPointClouds [ptCloud,pcMetadata] = readPointCloud(e57Reader,i); for j = 1:numel(ptCloud) ptCloudArr = [ptCloudArr ptCloud(j)]; tformArr = [tformArr pcMetadata.RelativePose]; end end
Align the point clouds from the file to create a map.
pcMap = pcalign(ptCloudArr,tformArr);
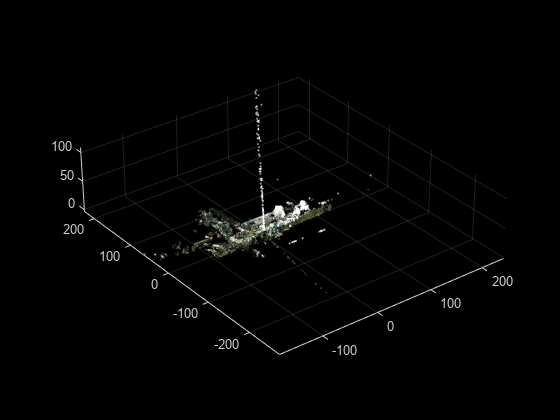
Display the map.
figure pcshow(pcMap)