pcorganize
Description
ptCloudOut = pcorganize(ptCloudIn,params)ptCloudIn, into an organized point cloud,
ptCloutOut, using the sensor parameters,
params.
Examples
Load point cloud data into the workspace.
fileName = fullfile(toolboxdir("lidar"),"lidardata","calibration","pointClouds","01.pcd"); ptCloudUnorg = pcread(fileName);
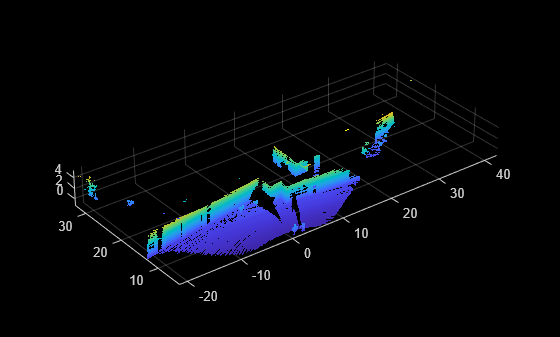
Visualize the point cloud.
figure pcshow(ptCloudUnorg)
Specify the horizontal resolution of the lidar sensor.
horizontalResolution = 1024;
Create a lidarParameters object that represents an Ouster OS1 sensor with the specified horizontalResolution.
params = lidarParameters('OS1Gen1-128',horizontalResolution);Convert the unorganized point cloud into an organized point cloud.
ptCloudOrg = pcorganize(ptCloudUnorg,params);
Display the dimensions of the input point cloud.
size(ptCloudUnorg.Location)
ans = 1×2
122155 3
Display the dimensions of the organized point cloud. pointCloud objects store organized point clouds as M-by-N-by-3 arrays, and unorganized point clouds as M-by-3 matrices.
size(ptCloudOrg.Location)
ans = 1×3
128 1024 3
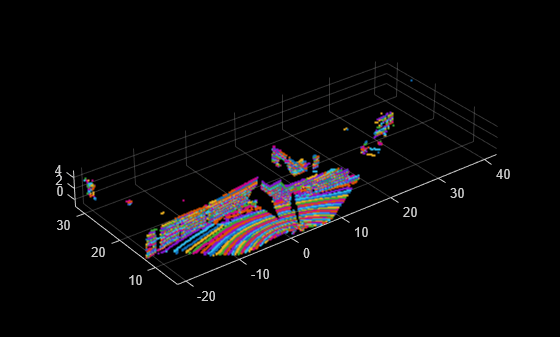
Visualize the organized point cloud. Use different colors to differentiate each scan line.
figure pcshow(ptCloudOrg,ColorSource="Row",MarkerSize=20) colormap("lines")
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2021b