Input-Output Polynomial Models
A polynomial model uses a generalized notion of transfer functions to express the relationship between the input, u(t), the output y(t), and the noise e(t) using an equation of the form:
A(q), B(q), F(q), C(q) and D(q) are polynomial matrices in terms of the time-shift operator q-1. u(t) is the input, and nk is the input delay. y(t) is the output and e(t) is the disturbance signal.
Each polynomial has an independent order, or number of estimable coefficients. For example, if A(q) has an order of 2, then the A polynomial has the form A(q) = 1 + a1q-1 + a2q-2.
In practice, not all the polynomials are simultaneously active. Simpler polynomial forms, such as ARX, ARMAX, Output-Error, and Box-Jenkins provide model structures suitable for specific objectives such as handling nonstationary disturbances or providing completely independent parameterization for dynamics and noise. For more information about these model types, see What Are Polynomial Models?
Apps
| System Identification | Identify models of dynamic systems from measured data |
Functions
Topics
Polynomial Model Basics
- What Are Polynomial Models?
Polynomial model structures including ARX, ARMAX, output-error, and Box-Jenkins. - Data Supported by Polynomial Models
Use time-domain and frequency-domain data to estimate discrete-time and continuous-time models.
Estimate Polynomial Models
- Preliminary Step – Estimating Model Orders and Input Delays
To estimate polynomial models, you must provide input delays and model orders. - Estimate Polynomial Models in the App
Import data into the app, specify model orders, delays and estimation options. - Estimate Polynomial Models at the Command Line
Specify model orders, delays, and estimation options. - Polynomial Sizes and Orders of Multi-Output Polynomial Models
Size of A, B, C, D, and F polynomials for multi-output models. - Estimate Models Using armax
This example shows how to estimate a linear, polynomial model with an ARMAX structure for a three-input and single-output (MISO) system. - Estimate ARMA Model Using Time Series Modeler app
Train, compare, and export ARMA models using the Time Series app.
Set Polynomial Model Options
- Specifying Initial States for Iterative Estimation Algorithms
Specify initial conditions of polynomial models for iterative estimation algorithms. - Polynomial Model Estimation Algorithms
Choose between the ARX and IV algorithms for ARX and AR model estimation.
Featured Examples
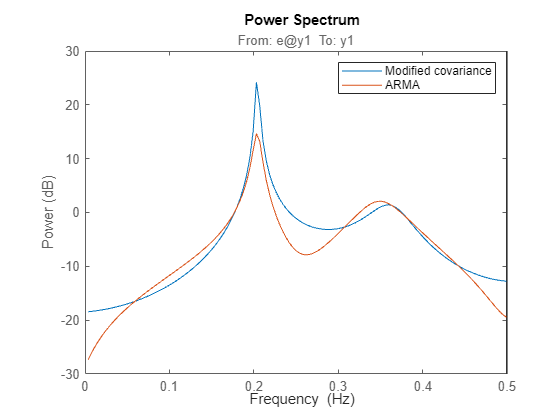
Spectrum Estimation Using Complex Data - Marple's Test Case
Perform spectral estimation on time series data. We use Marple's test case (The complex data in L. Marple: S.L. Marple, Jr, Digital Spectral Analysis with Applications, Prentice-Hall, Englewood Cliffs, NJ 1987.)

Picking Instrumental Variables for System Identification
Illustration of the meaning and choice of instrumental variables (IVs) for system identification.
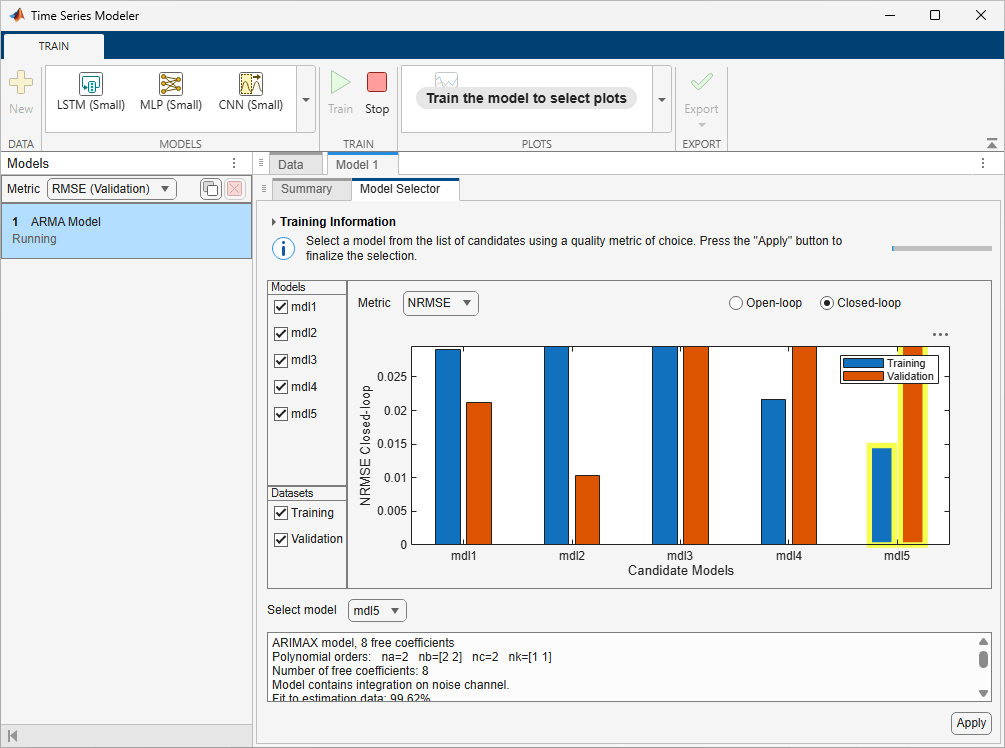
Predict Battery State-Of-Charge Using Time Series Modeler App
Train a multi-input single output autoregressive integrated moving average with extra input (ARIMAX) model using the Time Series Modeler app. You can use the workflow in this example to train autoregressive moving average (ARMA) models with different structures and training options.