kinematicTrajectory
Rate-driven trajectory generator
Description
The kinematicTrajectory
System object™ generates trajectories using specified acceleration and angular velocity.
To generate a trajectory from rates:
Create the
kinematicTrajectoryobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
trajectory = kinematicTrajectorytrajectory, that generates a trajectory based on
acceleration and angular velocity.
trajectory = kinematicTrajectory(Name,Value)Name to the specified Value.
Unspecified properties have default values.
Example: trajectory =
kinematicTrajectory('SampleRate',200,'Position',[0,1,10]) creates a kinematic
trajectory System object, trajectory, with a sample rate of 200 Hz and
the initial position set to [0,1,10].
Properties
Usage
Syntax
Description
[
outputs the trajectory state and then updates the trajectory state based on
position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration,bodyAngularVelocity)bodyAcceleration and bodyAngularVelocity.
This syntax is only valid if AngularVelocitySource is set to
'Input' and AccelerationSource is set to
'Input'.
[
outputs the trajectory state and then updates the trajectory state based on
position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAngularVelocity)bodyAngularVelocity.
This syntax is only valid if AngularVelocitySource is set to
'Input' and AccelerationSource is set to
'Property'.
[
outputs the trajectory state and then updates the trajectory state based on
position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration)bodyAcceleration.
This syntax is only valid if AngularVelocitySource is set to
'Property' and AccelerationSource is set to
'Input'.
[
outputs the trajectory state and then updates the trajectory state.position,orientation,velocity,acceleration,angularVelocity] = trajectory()
This syntax is only valid if AngularVelocitySource is set to
'Property' and AccelerationSource is set to
'Property'.
Input Arguments
Output Arguments
Object Functions
Examples
Create a default kinematicTrajectory System object™ and explore the relationship between input, properties, and the generated trajectories.
trajectory = kinematicTrajectory
trajectory =
kinematicTrajectory with properties:
SampleRate: 100
Position: [0 0 0]
Orientation: [1×1 quaternion]
Velocity: [0 0 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
By default, the kinematicTrajectory object has an initial position of [0 0 0] and an initial velocity of [0 0 0]. Orientation is described by a quaternion one (1 + 0i + 0j + 0k).
The kinematicTrajectory object maintains a visible and writable state in the properties Position, Velocity, and Orientation. When you call the object, the state is output and then updated.
For example, call the object by specifying an acceleration and angular velocity relative to the body coordinate system.
bodyAcceleration = [5,5,0]; bodyAngularVelocity = [0,0,1]; [position,orientation,velocity,acceleration,angularVelocity] = trajectory(bodyAcceleration,bodyAngularVelocity)
position = 1×3
0 0 0
orientation = quaternion
1 + 0i + 0j + 0k
velocity = 1×3
0 0 0
acceleration = 1×3
5 5 0
angularVelocity = 1×3
0 0 1
The position, orientation, and velocity output from the trajectory object correspond to the state reported by the properties before calling the object. The trajectory state is updated after being called and is observable from the properties:
trajectory
trajectory =
kinematicTrajectory with properties:
SampleRate: 100
Position: [2.5000e-04 2.5000e-04 0]
Orientation: [1×1 quaternion]
Velocity: [0.0500 0.0500 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
The acceleration and angularVelocity output from the trajectory object correspond to the bodyAcceleration and bodyAngularVelocity, except that they are returned in the navigation coordinate system. Use the orientation output to rotate acceleration and angularVelocity to the body coordinate system and verify they are approximately equivalent to bodyAcceleration and bodyAngularVelocity.
rotatedAcceleration = rotatepoint(orientation,acceleration)
rotatedAcceleration = 1×3
5 5 0
rotatedAngularVelocity = rotatepoint(orientation,angularVelocity)
rotatedAngularVelocity = 1×3
0 0 1
The kinematicTrajectory System object™ enables you to modify the trajectory state through the properties. Set the position to [0,0,0] and then call the object with a specified acceleration and angular velocity in the body coordinate system. For illustrative purposes, clone the trajectory object before modifying the Position property. Call both objects and observe that the positions diverge.
trajectoryClone = clone(trajectory); trajectory.Position = [0,0,0]; position = trajectory(bodyAcceleration,bodyAngularVelocity)
position = 1×3
0 0 0
clonePosition = trajectoryClone(bodyAcceleration,bodyAngularVelocity)
clonePosition = 1×3
10-3 ×
0.2500 0.2500 0
This example shows how to create a trajectory oscillating along the North axis of a local NED coordinate system using the kinematicTrajectory System object™.
Create a default kinematicTrajectory object. The default initial orientation is aligned with the local NED coordinate system.
traj = kinematicTrajectory
traj =
kinematicTrajectory with properties:
SampleRate: 100
Position: [0 0 0]
Orientation: [1×1 quaternion]
Velocity: [0 0 0]
AccelerationSource: 'Input'
AngularVelocitySource: 'Input'
Define a trajectory for a duration of 10 seconds consisting of rotation around the East axis (pitch) and an oscillation along North axis of the local NED coordinate system. Use the default kinematicTrajectory sample rate.
fs = traj.SampleRate;
duration = 10;
numSamples = duration*fs;
cyclesPerSecond = 1;
samplesPerCycle = fs/cyclesPerSecond;
numCycles = ceil(numSamples/samplesPerCycle);
maxAccel = 20;
triangle = [linspace(maxAccel,1/fs-maxAccel,samplesPerCycle/2), ...
linspace(-maxAccel,maxAccel-(1/fs),samplesPerCycle/2)]';
oscillation = repmat(triangle,numCycles,1);
oscillation = oscillation(1:numSamples);
accNED = [zeros(numSamples,2),oscillation];
angVelNED = zeros(numSamples,3);
angVelNED(:,2) = 2*pi;
Plot the acceleration control signal.
timeVector = 0:1/fs:(duration-1/fs); figure(1) plot(timeVector,oscillation) xlabel('Time (s)') ylabel('Acceleration (m/s)^2') title('Acceleration in Local NED Coordinate System')

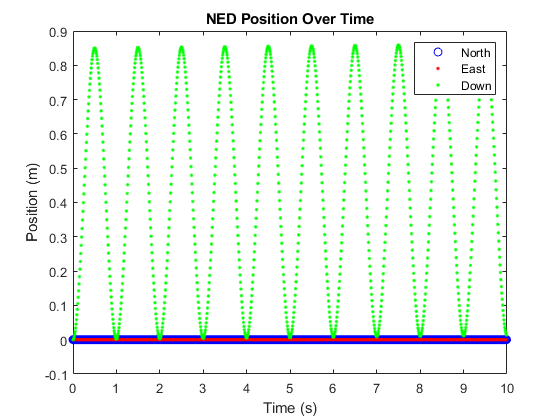
Generate the trajectory sample-by-sample in a loop. The kinematicTrajectory System object assumes the acceleration and angular velocity inputs are in the local sensor body coordinate system. Rotate the acceleration and angular velocity control signals from the NED coordinate system to the sensor body coordinate system using rotateframe and the Orientation state. Update a 3-D plot of the position at each time. Add pause to mimic real-time processing. Once the loop is complete, plot the position over time. Rotating the accNED and angVelNED control signals to the local body coordinate system assures the motion stays along the Down axis.
figure(2) plotHandle = plot3(traj.Position(1),traj.Position(2),traj.Position(3),'bo'); grid on xlabel('North') ylabel('East') zlabel('Down') axis([-1 1 -1 1 0 1.5]) hold on q = ones(numSamples,1,'quaternion'); for ii = 1:numSamples accBody = rotateframe(traj.Orientation,accNED(ii,:)); angVelBody = rotateframe(traj.Orientation,angVelNED(ii,:)); [pos(ii,:),q(ii),vel,ac] = traj(accBody,angVelBody); set(plotHandle,'XData',pos(ii,1),'YData',pos(ii,2),'ZData',pos(ii,3)) pause(1/fs) end figure(3) plot(timeVector,pos(:,1),'bo',... timeVector,pos(:,2),'r.',... timeVector,pos(:,3),'g.') xlabel('Time (s)') ylabel('Position (m)') title('NED Position Over Time') legend('North','East','Down')

Convert the recorded orientation to Euler angles and plot. Although the orientation of the platform changed over time, the acceleration always acted along the North axis.
figure(4) eulerAngles = eulerd(q,'ZYX','frame'); plot(timeVector,eulerAngles(:,1),'bo',... timeVector,eulerAngles(:,2),'r.',... timeVector,eulerAngles(:,3),'g.') axis([0,duration,-180,180]) legend('Yaw','Pitch','Roll') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')

This example shows how to generate a coil trajectory using the kinematicTrajectory System object™.
Create a circular trajectory for a 1000 second duration and a sample rate of 10 Hz. Set the radius of the circle to 5000 meters and the speed to 80 meters per second. Set the climb rate to 100 meters per second and the pitch to 15 degrees. Specify the initial orientation as pointed in the direction of motion.
duration = 1000; % seconds fs = 10; % Hz N = duration*fs; % number of samples radius = 5000; % meters speed = 80; % meters per second climbRate = 50; % meters per second initialYaw = 90; % degrees pitch = 15; % degrees initPos = [radius, 0, 0]; initVel = [0, speed, climbRate]; initOrientation = quaternion([initialYaw,pitch,0],'eulerd','zyx','frame'); trajectory = kinematicTrajectory('SampleRate',fs, ... 'Velocity',initVel, ... 'Position',initPos, ... 'Orientation',initOrientation);
Specify a constant acceleration and angular velocity in the body coordinate system. Rotate the body frame to account for the pitch.
accBody = zeros(N,3); accBody(:,2) = speed^2/radius; accBody(:,3) = 0.2; angVelBody = zeros(N,3); angVelBody(:,3) = speed/radius; pitchRotation = quaternion([0,pitch,0],'eulerd','zyx','frame'); angVelBody = rotateframe(pitchRotation,angVelBody); accBody = rotateframe(pitchRotation,accBody);
Call trajectory with the specified acceleration and angular velocity in the body coordinate system. Plot the position, orientation, and speed over time.
[position, orientation, velocity] = trajectory(accBody,angVelBody); eulerAngles = eulerd(orientation,'ZYX','frame'); speed = sqrt(sum(velocity.^2,2)); timeVector = (0:(N-1))/fs; figure(1) plot3(position(:,1),position(:,2),position(:,3)) xlabel('North (m)') ylabel('East (m)') zlabel('Down (m)') title('Position') grid on

figure(2) plot(timeVector,eulerAngles(:,1),... timeVector,eulerAngles(:,2),... timeVector,eulerAngles(:,3)) axis([0,duration,-180,180]) legend('Yaw (Rotation Around Down)','Pitch (Rotation Around East)','Roll (Rotation Around North)') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')

figure(3) plot(timeVector,speed) xlabel('Time (s)') ylabel('Speed (m/s)') title('Speed')

Define a constant angular velocity and constant acceleration that describe a spiraling circular trajectory.
Fs = 100; r = 10; speed = 2.5; initialYaw = 90; initPos = [r 0 0]; initVel = [0 speed 0]; initOrient = quaternion([initialYaw 0 0], 'eulerd', 'ZYX', 'frame'); accBody = [0 speed^2/r 0.01]; angVelBody = [0 0 speed/r];
Create a kinematic trajectory object.
traj = kinematicTrajectory('SampleRate',Fs, ... 'Position',initPos, ... 'Velocity',initVel, ... 'Orientation',initOrient, ... 'AccelerationSource','Property', ... 'Acceleration',accBody, ... 'AngularVelocitySource','Property', ... 'AngularVelocity',angVelBody);
Call the kinematic trajectory object in a loop and log the position output. Plot the position over time.
N = 10000; pos = zeros(N, 3); for i = 1:N pos(i,:) = traj(); end plot3(pos(:,1), pos(:,2), pos(:,3)) title('Position') xlabel('X (m)') ylabel('Y (m)') zlabel('Z (m)')

Extended Capabilities
Version History
Introduced in R2018b