compassAngle
Description
C = compassAngle(orientations)orientations. Compass angles are counter-clockwise angles from north
of the reference frame to the x-directions of the frames defined by
orientations. See Compass Angle for more details.
C = compassAngle(orientations,RF)"NED" (north-east-down) or
"ENU" (east-north-up) reference frame.
Examples
Input Arguments
Output Arguments
More About
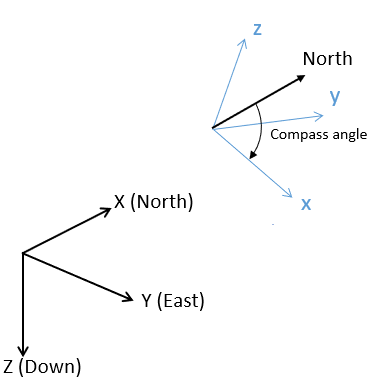
The compass angle is defined as the angle from the north to the x-direction of the body
frame. In the NED reference frame, the compass angle is the counter-clockwise angle from the
positive-x direction of the NED frame to the positive-x direction of the body frame. The
orientations input defines the rotational coordinate transformation
from the reference frame to the body frame. The compass angles of the north, east, south,
and west directions are 0, π/2, π, and 3π/2, respectively.
References
[1] Gade, Kenneth. “The Seven Ways to Find Heading.” Journal of Navigation, vol. 69, no. 5, Sept. 2016, pp. 955–70.
Extended Capabilities
Version History
Introduced in R2023b
See Also
gravitydir | tilt | linaccel