dsp.VariableFractionalDelay
Delay input by time-varying fractional number of sample periods
Description
The dsp.VariableFractionalDelay
System object™ delays the input signal by a specified number of fractional samples along each
channel of the input. The object can also concurrently compute multiple delayed versions
(taps) of the same signal. For an example, see Signal Delay Using Multitap Fractional Delay.
The object interpolates the input signal to obtain new samples at noninteger sampling
intervals. You can set the InterpolationMethod property to 'Linear',
'FIR', or 'Farrow'. The object supports time-varying
delay values. That is, the delay value can vary within a frame from sample to sample. You can
also specify the maximum value of the delay by using the MaximumDelay
property. Delay values greater than the maximum are clipped to the maximum.
To delay the input by a time-varying fractional number of sample periods:
Create the
dsp.VariableFractionalDelayobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
vfd = dsp.VariableFractionalDelay
vfd = dsp.VariableFractionalDelay(PropertyName,Value)
Example: dsp.VariableFractionalDelay('MaximumDelay',50);
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Delay a signal by a varying fractional number of sample periods using the dsp.VariableFractionalDelay object. The object uses the 'Linear' interpolation method.
Specify the input signal using the dsp.SignalSource object.
sr = dsp.SignalSource; vfd = dsp.VariableFractionalDelay(InterpolationMethod="Linear",... MaximumDelay=20)
vfd =
dsp.VariableFractionalDelay with properties:
InterpolationMethod: 'Linear'
InitialConditions: 0
MaximumDelay: 20
Show all properties
sink = dsp.SignalSink;
Determine the range of the delay values that the variable fractional delay object accepts by calling the info function.
info(vfd)
ans = struct with fields:
ValidDelayRange: '[0, 20]'
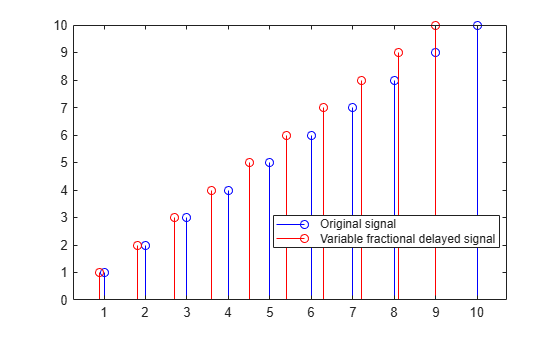
Specify the delay values to the object within this range. In this example, the delay value varies from 0.1 to 1 sample.
for ii = 1:10 delayedsig = vfd(sr(), ii/10); sink(delayedsig); end sigd = sink.Buffer;
The output sigd corresponds to the values of the delayed signal that are sampled at fixed-time intervals. To plot the time instants at which the amplitudes of signal samples are constant, treat the signals as the sampling instants.
stem(sr.Signal,1:10,'b') hold on; stem(sigd.',1:10,'r'); legend('Original signal', ... 'Variable fractional delayed signal', ... 'Location','best')
Delay the input signal using the dsp.VariableFractionalDelay object. Each delay value is unique and can vary from sample to sample within a frame, and can vary across channels. You can compute multiple delayed versions of the same input signal concurrently by passing a delay input with the appropriate dimension.
Consider the input to be a random signal with one channel and a frame size of 10. Apply a delay of 4.8 and 8.2 samples concurrently.
vfd = dsp.VariableFractionalDelay
vfd =
dsp.VariableFractionalDelay with properties:
InterpolationMethod: 'Linear'
InitialConditions: 0
MaximumDelay: 100
Show all properties
in = randn(10,1)
in = 10×1
0.5377
1.8339
-2.2588
0.8622
0.3188
-1.3077
-0.4336
0.3426
3.5784
2.7694
delayVec = [4.8 8.2]; outcase1 = vfd(in,delayVec)
outcase1 = 10×2
0 0
0 0
0 0
0 0
0.1075 0
0.7969 0
1.0153 0
-1.6346 0
0.7535 0.4301
-0.0065 1.5746
Each channel in the output is delayed by 4.8 and 8.2 samples, respectively. The object uses the 'Linear' interpolation method to compute the delayed value. For more details, see 'Algorithms' in the dsp.VariableFractionalDelay object page.
For the same delay vector, if the input has 2 channels, each element of the delay vector is applied on the corresponding channel in the input.
release(vfd); in = randn(10,2)
in = 10×2
-1.3499 0.6715
3.0349 -1.2075
0.7254 0.7172
-0.0631 1.6302
0.7147 0.4889
-0.2050 1.0347
-0.1241 0.7269
1.4897 -0.3034
1.4090 0.2939
1.4172 -0.7873
outcase2 = vfd(in,delayVec)
outcase2 = 10×2
0 0
0 0
0 0
0 0
-0.2700 0
-0.4729 0
2.5730 0
0.5677 0
0.0925 0.5372
0.5308 -0.8317
To compute multiple delayed versions of the two-dimensional input signal, pass the delay vector as a three-dimensional array. The third dimension contains the taps or delays to apply on the signal. If you pass a non-singleton third dimension (1-by-1-by-P), where P represents the number of taps, the same tap is applied across all the channels. Pass the delays [4.8 8.2] in the third dimension.
clear delayVec; delayVec(1,1,1) = 4.8; delayVec(1,1,2) = 8.2; whos delayVec
Name Size Bytes Class Attributes delayVec 1x1x2 16 double
delayVec is a 1-by-1-by-2 array. Pass the two-dimensional input to the dsp.VariableFractionalDelay object with this delay vector.
release(vfd); outcase3 = vfd(in,delayVec)
outcase3 =
outcase3(:,:,1) =
0 0
0 0
0 0
0 0
-0.2700 0.1343
-0.4729 0.2957
2.5730 -0.8225
0.5677 0.8998
0.0925 1.4020
0.5308 0.5981
outcase3(:,:,2) =
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
-1.0799 0.5372
2.1580 -0.8317
whos outcase3Name Size Bytes Class Attributes outcase3 10x2x2 320 double
outcase3(:,:,1) represents the input signal delayed by 4.8 samples. outcase3(:,:,2) represents the input signal delayed by 8.2 samples. The same delay is applied across all the channels.
In addition, if you pass a non-singleton second dimension (1-by-L-by-P), where L is the number of input channels, taps vary across channels. Apply the delay vectors [2.3 3.5] and [4.4 5.6] to compute the two delayed versions of the input signal.
clear delayVec; delayVec(1,1,1) = 2.3; delayVec(1,2,1) = 3.5; delayVec(1,1,2) = 4.4; delayVec(1,2,2) = 5.6; whos delayVec
Name Size Bytes Class Attributes delayVec 1x2x2 32 double
release(vfd); outcase4 = vfd(in,delayVec)
outcase4 =
outcase4(:,:,1) =
0 0
0 0
-0.9449 0
1.7195 0.3357
1.4183 -0.2680
0.1735 -0.2451
0.4814 1.1737
0.0709 1.0596
-0.1484 0.7618
1.0055 0.8808
outcase4(:,:,2) =
0 0
0 0
0 0
0 0
-0.8099 0
1.2810 0.2686
1.6492 -0.0801
0.2523 -0.4376
0.4036 1.0824
0.1629 1.1737
whos outcase4Name Size Bytes Class Attributes outcase4 10x2x2 320 double
outcase4(:,:,1) contains the input signal delayed by the vector [2.3 3.5]. outcase4(:,:,2) contains the input signal delayed by the vector [4.4 5.6].
To vary the delay within a frame from sample to sample, the first dimension of the delay vector (N-by-1-by-P or N-by-L-by-P) must equal the frame size of the input (N-by-L). Pass a delay vector of size 10-by-1-by-2.
clear delayVec; delayVec(:,1,1) = 3.1:0.1:4; delayVec(:,1,2) = 0.1:0.1:1; whos delayVec
Name Size Bytes Class Attributes delayVec 10x1x2 160 double
release(vfd); outcase5 = vfd(in,delayVec)
outcase5 =
outcase5(:,:,1) =
0 0
0 0
0 0
-0.8099 0.4029
0.8425 -0.2680
2.1111 -0.4376
0.4889 0.9911
0.0925 1.4020
0.6228 0.5435
-0.2050 1.0347
outcase5(:,:,2) =
-1.2149 0.6043
2.1580 -0.8317
1.4183 0.1398
0.2523 1.2650
0.3258 1.0596
0.3469 0.7072
-0.1807 0.9424
0.1986 0.5208
1.4816 -0.2437
1.4090 0.2939
Delay varies across each element in a channel. Same set of delay values apply across all channels. delayVec(:,1,1) applies to the first delayed signal and delayVec(:,1,2) applies to the second delayed signal.
dsp.VariableFractionalDelay System object supports variable-size input and delay signals. That is, you can change the dimension of the input signal and the delay signal even after calling the algorithm. You can change the dimensions of one or both the signals simultaneously. Together, they must make sure that the number of output channels (number of columns) remains constant.
Variable-Size Support for Input Signal
The number of samples in each frame of the input signal can change. However, the number of input channels must remain constant.
Create a dsp.VariableFractionalDelay object. Pass an input signal of size [256 1] and a delay of 1.4 to the object algorithm. In subsequent calls to the algorithm, change the input frame size to 128, 512, and 64, respectively
vfd = dsp.VariableFractionalDelay; vfd(randn(256,1),1.4); vfd(randn(128,1),1.4); vfd(randn(512,1),1.4); vfd(randn(64,1),1.4);
The output frame size (number of rows) changes according to the input frame size. The number of output channels in each of these cases is 1.
To change the number of input channels, release the object.
release(vfd);
Call the algorithm with a two-channel input and vary the input frame size in subsequent calls.
vfd(randn(256,2),1.4); vfd(randn(128,2),1.4);
Variable-Size Support for Delay Signal
In addition to the input, the delay signal can also vary. That is, you can change one or both of the dimensions of the delay signal after calling the algorithm. However, the object must make sure that the resulting number of output channels remains constant. The delay signal can be a scalar, vector, matrix, or an N-D array.
release(vfd); vfd(randn(512,2),randn(512,2)); vfd(randn(128,2),[1.4 1.7]); vfd(randn(256,2),randn(256,1)); vfd(randn(128,2),1.4);
In each of these cases, the number of output channels is 2. To apply different delays on the input signal, release the object.
release(vfd); vfd(randn(256,1),randn(256,7)); vfd(randn(512,1),randn(512,7)); vfd(randn(100,1),randn(100,7)); vfd(randn(100,1),randn(1,7));
The output in each of these cases is [256 7], [512 7], [100 7], and [100 7], respectively.
More About
The diagrams in the following sections show the data types used within the
dsp.VariableFractionalDelay object for fixed-point signals.
Although you can specify most of these data types, the following data types are computed internally by the object and cannot be directly specified on the object interface.
| Data Type | Word Length | Fraction Length |
|---|---|---|
| vf data type | Same word length as the coefficients | Same as the word length |
| HoldInteger data type | Same word length as the input delay value | 0 bits |
| Integer data type | 32 bits | 0 bits |
Note
When the input is fixed point, all internal data types are signed fixed point.
The following diagram shows the fixed-point data types used by the Linear interpolation mode of the variable fractional delay algorithm.

The following diagram illustrates how the variable fractional delay object selects the arm of the polyphase filter structure that most closely matches the fractional delay value (vf).

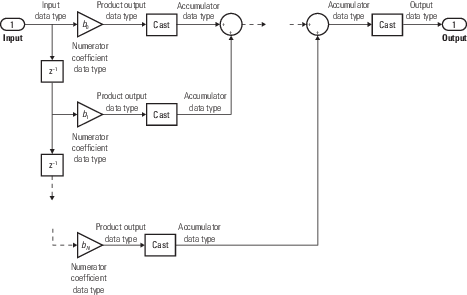
The following diagram shows the fixed-point data types used by the variable fractional delay algorithm in the FIR interpolation mode.
You can set the coefficient, product output, accumulator, and output data types in the object. This diagram shows that input data is stored in the input buffer with the same data type and scaling as the input. The object stores filtered data and any initial conditions in the output buffer using the output data type and scaling that you set.
When at least one of the inputs to the multiplier is real, the output of the multiplier is in the product output data type. When both inputs to the multiplier are complex, the result of the multiplication is in the accumulator data type. For details on the complex multiplication, see Multiplication Data Types.
The following diagram shows the fixed-point data types used by the Farrow interpolation mode when:
Farrow filter length is set to
4Farrow small delay action is set to
'Clip to the minimum value necessary for centered kernel'

The following diagram shows the fixed-point data types used by the Farrow interpolation mode when:
Farrow filter length is set to
4Farrow small delay action is set to
'Use off-centered kernel'

Diff is computed from the integer part of the delay value
(vi) and the farrow filter length
(N) according to the following equation:
The following diagram shows the fixed-point data types used by the FIR direct form filter.