vision.labeler.loading.PointCloudSequenceSource Class
Namespace: vision.labeler.loading
Superclasses: vision.labeler.loading.MultiSignalSource
Load signals from point cloud sequence sources into Ground Truth Labeler app
Description
The vision.labeler.loading.PointCloudSequenceSource class creates an
interface for loading signals from point cloud sequence data sources into the Ground
Truth Labeler app. In the Add/Remove Signal dialog box of the app, when
Source Type is set to Point Cloud Sequence,
this class controls the parameters in that dialog box.
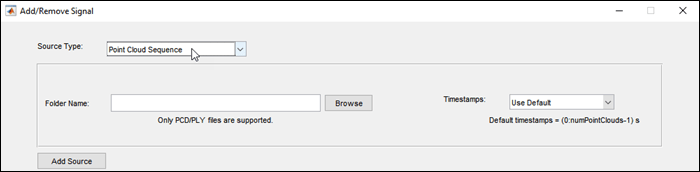
To access this dialog box, in the app, select Import > Add Signals.
The default implementation of this class loads point cloud sequences composed of PCD or PLY files.
The vision.labeler.loading.PointCloudSequenceSource class is a handle class.
Creation
When you export labels from a Ground Truth Labeler app session that contains
point cloud sequence sources, the exported groundTruthMultisignal object stores instances of this class in its
DataSource property.
To create a PointCloudSequenceSource object programmatically, such as
when programmatically creating a groundTruthMultisignal object, use the
vision.labeler.loading.PointCloudSequenceSource function (described
here).
Description
pcseqSource = vision.labeler.loading.PointCloudSequenceSourcePointCloudSequenceSource object for loading signals from point
cloud sequence data sources. To specify the data source and the parameters required to
load the source, use the loadSource method.
Properties
Methods
Examples
Specify the path to a folder containing a point cloud sequence.
pcSeqFolder = fullfile(toolboxdir('driving'),'core','drivingdata',... 'lidarSequence');
Load the timestamps that correspond to the sequence.
load(fullfile(pcSeqFolder,'timestamps.mat'));Create a point cloud sequence source. Load the folder path and timestamps into the PointCloudSequenceSource object.
sourceName = pcSeqFolder; sourceParams = struct; sourceParams.Timestamps = timestamps; pcseqSource = vision.labeler.loading.PointCloudSequenceSource; loadSource(pcseqSource,sourceName,sourceParams);
Read the first frame in the sequence. Display the frame.
signalName = pcseqSource.SignalName; pc = readFrame(pcseqSource,signalName,1); figure pcshow(pc)

Tips
You can this class as a starting point for creating a custom data source loading class. To view the source code for this class, use this command:
edit vision.labeler.loading.PointCloudSequenceSource
Version History
Introduced in R2020a