vehicleCostmap
Costmap representing planning space around vehicle
Description
The vehicleCostmap object creates a costmap that represents
the planning search space around a vehicle. The costmap holds information about the
environment, such as obstacles or areas that the vehicle cannot traverse. To check for
collisions, the costmap inflates obstacles using the inflation radius specified in the
CollisionChecker property. The costmap is used by path planning
algorithms, such as pathPlannerRRT, to find collision-free paths for the vehicle to
follow.
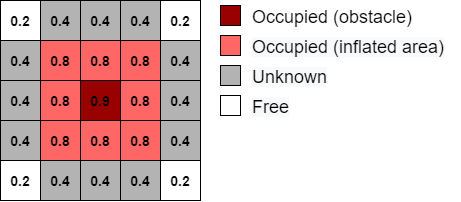
The costmap is stored as a 2-D grid of cells, often called an occupancy
grid or occupancy map. Each grid cell in the
costmap has a value in the range [0, 1] representing the cost of navigating through that
grid cell. The state of each grid cell is free,
occupied, or unknown, as determined by
the FreeThreshold and OccupiedThreshold properties.
The following figure shows a costmap with sample costs and grid cell states.
Creation
Syntax
Description
costmap = vehicleCostmap( creates
a vehicle costmap using the cost values in matrix C)C.
costmap = vehicleCostmap(
creates a vehicle costmap from the occupancy map occMap)occMap.
Use of this syntax requires Navigation Toolbox™.
costmap = vehicleCostmap(___,'MapLocation',
specifies in mapLocation)mapLocation the bottom-left corner coordinates
of the costmap. Specify 'MapLocation',mapLocation after any
of the preceding inputs and in any order among the
Name,Value pair arguments.
costmap = vehicleCostmap(___,
uses Name,Value)Name,Value pair arguments to specify the FreeThreshold, OccupiedThreshold, CollisionChecker, and CellSize properties. For example,
vehicleCostmap(C,'CollisionChecker',ccConfig) uses an
inflationCollisionChecker object, ccConfig, to
represent the vehicle shape and check for collisions. After you create the
object, you can update all of these properties except
CellSize.
Input Arguments
Properties
Object Functions
checkFree | Check vehicle costmap for collision-free poses or points |
checkOccupied | Check vehicle costmap for occupied poses or points |
getCosts | Get cost value of cells in vehicle costmap |
setCosts | Set cost value of cells in vehicle costmap |
plot | Plot vehicle costmap |
Examples
Create a 10-by-20 meter costmap that is divided into square cells of size 0.5-by-0.5 meters. Specify a default cost value of 0.5 for all cells.
mapWidth = 10;
mapLength = 20;
costVal = 0.5;
cellSize = 0.5;
costmap = vehicleCostmap(mapWidth,mapLength,costVal,'CellSize',cellSize)costmap =
vehicleCostmap with properties:
FreeThreshold: 0.2000
OccupiedThreshold: 0.6500
CollisionChecker: [1×1 driving.costmap.InflationCollisionChecker]
CellSize: 0.5000
MapSize: [40 20]
MapExtent: [0 10 0 20]
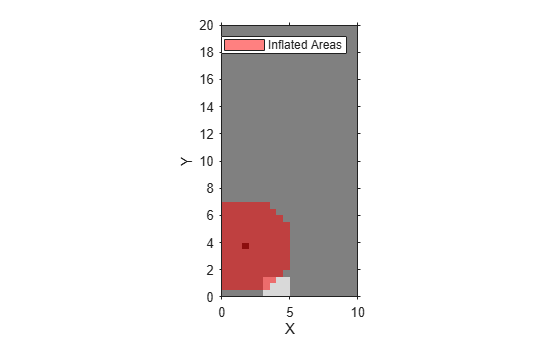
Mark an obstacle on the costmap. Display the costmap.
occupiedVal = 0.9; xyPoint = [2,4]; setCosts(costmap,xyPoint,occupiedVal) plot(costmap)
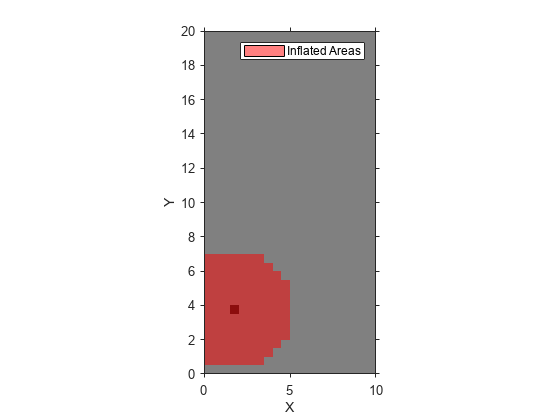
Mark an obstacle-free area on the costmap. Display the costmap again.
freeVal = 0.15; [X,Y] = meshgrid(3.5:cellSize:5,0.5:cellSize:1.5); setCosts(costmap,[X(:),Y(:)],freeVal) plot(costmap)
Plan the shortest vehicle path to a parking spot using the A* grid algorithm. Then impose nonholonomic constraints on the vehicle and replan the path using the Hybrid A* algorithm.
Create Occpancy Map
Load a costmap of a parking lot. Create an occupancyMap (Navigation Toolbox) object using the properties of the costmap object. Visualize the occupancy map.
data = load('parkingLotCostmapReducedInflation.mat');
costmapObj = data.parkingLotCostmapReducedInflation;
resolution = 1/costmapObj.CellSize;
oMap = occupancyMap(costmapObj.Costmap,resolution);
oMap.FreeThreshold = costmapObj.FreeThreshold;
oMap.OccupiedThreshold = costmapObj.OccupiedThreshold;
show(oMap)![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/driving/win64/PlanPathUsingAStarPathPlannersExample_01.png)
Plan Path Using A* Grid Planner
Use the occupancy map to create a plannerAStarGrid (Navigation Toolbox) object.
gridPlanner = plannerAStarGrid(oMap);
Define the start and goal positions in world coordinate frame. The origin of this coordinate frame is at the bottom-left corner of the map.
startPos = [11,10]; goalPos = [31.5,18];
Plan a path from the start point to the goal point in world coordinates.
path = plan(gridPlanner,startPos,goalPos,"world");Visualize the path and the explored nodes using the show object function.
show(gridPlanner)
![Figure contains an axes object. The axes object with title AStar, xlabel X [meters], ylabel Y [meters] contains 8 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Path, Start, Goal, GridsExplored.](../../examples/driving/win64/PlanPathUsingAStarPathPlannersExample_02.png)
Impose Nonholonomic Constraints and Replan Using Hybrid A* Planner
Create a state validator object for validating planned path using collision checking. Assign the occupancy map to the state validator object.
validator = validatorOccupancyMap; validator.Map = oMap;
Initialize a plannerHybridAStar (Navigation Toolbox) object with the state validator object. Impose the nonholonomic constraints of minimum turning radius and motion primitive length by specifying the MinTurningRadius and MotionPrimitiveLength properties of the planner.
hybridPlanner = plannerHybridAStar(validator,MinTurningRadius=4,MotionPrimitiveLength=6);
Define start and goal poses for the vehicle as [x, y, theta] vectors. x and y specify the position in meters, and theta specifies the orientation angle in radians.
startPose = [4 4 pi/2]; % [meters, meters, radians]
goalPose = [45 27 -pi/2];Plan a path from the start pose to the goal pose.
refpath = plan(hybridPlanner,startPose,goalPose);
Visualize the path using show object function.
show(hybridPlanner)
![Figure contains an axes object. The axes object with title Hybrid A* Path Planner, xlabel X [meters], ylabel Y [meters] contains 9 objects of type image, line, scatter. These objects represent Reverse Motion Primitives, Forward Motion Primitives, Forward Path, Reverse Path, Path Points, Orientation, Start, Goal.](../../examples/driving/win64/PlanPathUsingAStarPathPlannersExample_03.png)
Algorithms
To simplify checking for whether a vehicle pose is in collision,
vehicleCostmap inflates the size of obstacles. The
collision-checking algorithm follows these steps:
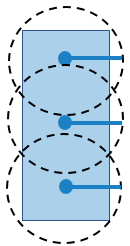
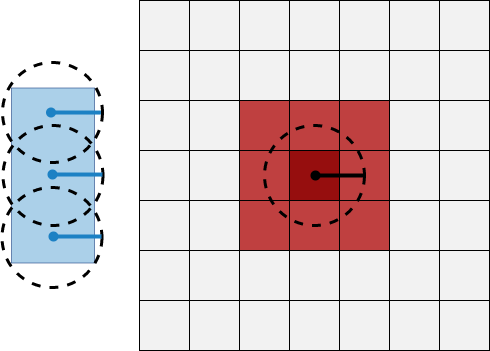
Calculate the inflation radius, in world units, from the vehicle dimensions. The default inflation radius is equal to the radius of the smallest set of overlapping circles required to completely enclose the vehicle. The center points of the circles lie along the longitudinal axis of the vehicle. Increasing the number of circles decreases the inflation radius, which enables more precise collision checking.
Inflation Radius, One Center Inflation Radius, Three Centers 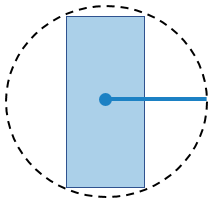
Convert the inflation radius to a number of grid cells, R. Round up noninteger values of R to the next largest integer.
Inflate the size of obstacles using R. Label all cells in the inflated area as occupied.
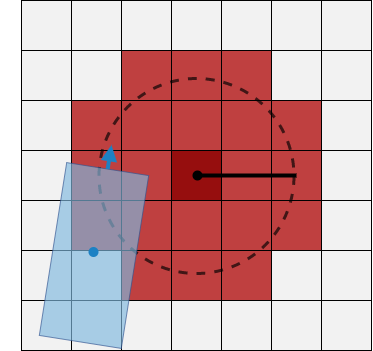
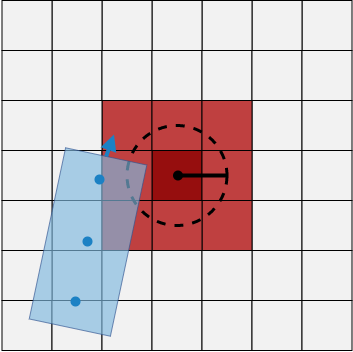
The diagrams show occupied cells in dark red. Cells in the inflated area are colored in light red. The solid black line shows the original inflation radius. In the diagram on the left, R is 3. In the diagram on the right, R is 2.
Inflated Grid Cells, One Center Inflated Grid Cells, Three Centers 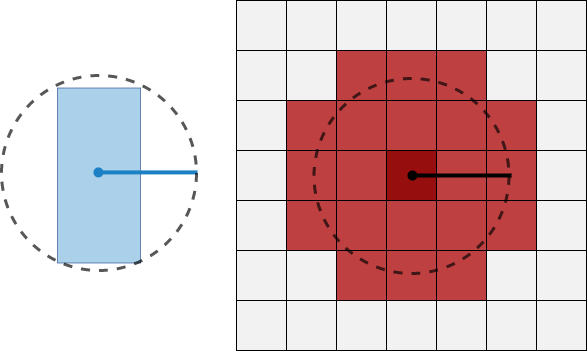
Check whether the center points of the vehicle lie on inflated grid cells.
If any center point lies on an inflated grid cell, then the vehicle pose is occupied. The
checkOccupiedfunction returnstrue. An occupied pose does not necessarily mean a collision. For example, the vehicle might lie on an inflated grid cell but not on the grid cell that is actually occupied.If no center points lie on inflated grid cells, and the cost value of each cell containing a center point is less than
FreeThreshold, then the vehicle pose is free. ThecheckFreefunction returnstrue.If no center points lie on inflated grid cells, and the cost value of any cell containing a center point is greater than
FreeThreshold, then the vehicle pose is unknown. BothcheckFreeandcheckOccupiedreturnfalse.
The following poses are considered in collision because at least one center point is on an inflated area.
| Pose in Collision, One Center | Pose in Collision, Three Centers |
|---|---|
|
|
|