recordedSensorData
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
Create GPSData Object
gpsData = recordedSensorData("gps",timestamps,latitude,longitude,altitude)GPSData
object, gpsData, with the Timestamps,
Latitude, Longitude, and
Altitude properties set by the timestamps,
latitude, longitude, and
altitude arguments, respectively. Additionally, this syntax sets
the SampleRate, SampleTime,
Duration, and NumSamples properties.
Create Trajectory Object
trajectory = recordedSensorData("trajectory")Trajectory
object, trajectory.
trajectory = recordedSensorData("trajectory",timestamps,x,y,z)Trajectory
object, trajectory, using the specified timestamps
timestamps and the xyz-coordinates of the
corresponding waypoints. x, y, and
z specify the first, second, and third columns of the
Position property, respectively.
trajectory = recordedSensorData("trajectory",timestamps,waypoints)trajectory, using the specified timestamps
timestamps and the corresponding waypoints
waypoints. The waypoints argument specifies
the Position property.
Create CameraData Object
camData = recordedSensorData("camera")CameraData
object, camData.
camData = recordedSensorData("camera",timestamps,frames)CameraData
object, camData, with the Timestamps and
Frames properties set by the timestamps and
frames arguments, respectively. Additionally, this syntax sets the
SampleRate, SampleTime,
Duration, and NumSamples properties.
camData = recordedSensorData("camera",video)CameraData
object, camData, containing image data extracted from the specified
video video.
camData = recordedSensorData("camera",rosbag,topic)topic in the input rosbag file rosbag, and
creates a CameraData
object, camData. (since R2025b)
Note: To use a rosbag file or ROS 2 bag file, you must have a ROS Toolbox license.
Create LidarData Object
lidarData = recordedSensorData("lidar",timestamps,pointClouds)LidarData
object, lidarData, with the Timestamps and
PointClouds properties set by the timestamps
and pointClouds arguments, respectively. Additionally, this syntax
sets the SampleRate, SampleTime,
Duration, and NumSamples properties.
lidarData = recordedSensorData("lidar",rosbag,topic)topic in the input rosbag file rosbag, and
creates a LidarData
object, lidarData. (since R2025b)
Note: To use a rosbag file or ROS 2 bag file, you must have a ROS Toolbox license.
Create ActorTrackData Object
Since R2025a
trackData = recordedSensorData("actorTrack")ActorTrackData
object, trackdata.
trackData = recordedSensorData("actorTrack",timestamps,trackID,position)ActorTrackData
object with the Timestamps, TrackID, and
Position properties set by the timestamp,
trackID, and position arguments, respectively.
Additionally, this syntax sets the SampleRate,
SampleTime, Duration,
NumSamples, and UniqueTrackIDs
properties.
Specify Property Values
[___] = recordedSensorData(___,
sets properties of the output sensor data object, in addition to any combination of
arguments from previous syntaxes. varargin)varargin represents a
variable-length name-value argument list for the corresponding sensor data object. For
example, Name="sensor1" specifies the Name
property of the output sensor as "sensor1".
Examples
Load recorded GPS data into the workspace.
load("recordedGPSData.mat","latitudes","longitudes","altitudes","timestamps")
Create an empty GPSData object to store GPS data.
gpsData = recordedSensorData("gps",Name="GPSSensor")
gpsData =
GPSData with properties:
Name: "GPSSensor"
NumSamples: 0
Duration: 0
SampleRate: 0
SampleTime: 0
Timestamps: []
Latitude: []
Longitude: []
Altitude: []
Attributes: []
Add data samples to the GPS data object.
add(gpsData,timestamps,latitudes,longitudes,altitudes)
Display the GPSData object.
disp(gpsData)
GPSData with properties:
Name: "GPSSensor"
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
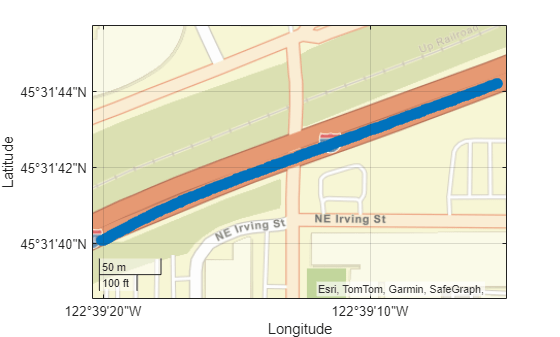
Plot the GPS data object.
plot(gpsData)
![]()
Load recorded GPS data into the workspace.
load("recordedGPSData.mat","latitudes","longitudes","altitudes","timestamps")
Create a GPSData object using the information from the GPS data.
gpsData = recordedSensorData("gps",timestamps,latitudes,longitudes,altitudes,Name="GPSSensor")
gpsData =
GPSData with properties:
Name: "GPSSensor"
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
Display the GPS data object.
disp(gpsData)
GPSData with properties:
Name: "GPSSensor"
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Latitude: [392×1 single]
Longitude: [392×1 single]
Altitude: [392×1 single]
Attributes: []
Plot the GPS data object.
plot(gpsData)
Load recorded GPS trajectory data into the workspace.
load("recordedGPSData.mat","X","Y","Z","timestamps")
Create an empty Trajectory object to store the GPS trajectory data.
traj = recordedSensorData("trajectory",Name="EgoTrajectory")
traj =
Trajectory with properties:
Name: "EgoTrajectory"
NumSamples: 0
Duration: 0
SampleRate: 0
SampleTime: 0
Timestamps: []
Position: []
Orientation: []
Velocity: []
Course: []
GroundSpeed: []
Acceleration: []
AngularVelocity: []
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
Add trajectories to the trajectory object.
add(traj,timestamps,X,Y,Z)
Display the trajectory object.
disp(traj)
Trajectory with properties:
Name: "EgoTrajectory"
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
Plot the trajectory object.
plot(traj)
![]()
Create an empty CameraData object to store camera data.
camData = recordedSensorData("camera",Name="CameraSensor")
camData =
CameraData with properties:
Name: "CameraSensor"
NumSamples: 0
Duration: 0
SampleRate: 0
SampleTime: 0
Timestamps: []
Frames: []
SensorParameters: []
Attributes: []
Specify the path of a video file.
filePath = fullfile(toolboxdir("driving"),"drivingdata","udacity","drive_segment_09_29_16","centerCamera.avi");
Add data samples from the video to the camera data object.
add(camData,filePath)
Play the camera data object.
play(camData)
![]()
Create an empty LidarData object to store point clouds.
lidarData = recordedSensorData("lidar",Name="LidarSensor")
lidarData =
LidarData with properties:
Name: "LidarSensor"
NumSamples: 0
Duration: 0
SampleRate: 0
SampleTime: 0
Timestamps: []
PointClouds: []
SensorParameters: []
Attributes: []
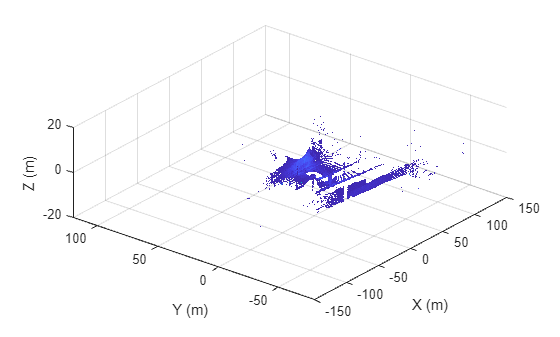
Specify a path containing a sequence of point cloud files.
files = dir(fullfile(toolboxdir("vision"),"visiondata","pcdmapseq","*.pcd")); pcds = strcat({files.folder},filesep,{files.name})';
Specify timestamps for each point cloud in the point cloud data.
timestamps = (1:4)';
Add the point cloud data samples to the lidar data object.
add(lidarData,timestamps,pcds);
Visualize the lidar data object.
play(lidarData)
![]()
Since R2025a
Load recorded actor track data into the workspace.
load("trackedActorData.mat")Create an empty ActorTrackData object to store actor tracks.
trackData = recordedSensorData("actorTrack",Name="ActorTracks")
trackData =
ActorTrackData with properties:
Name: "ActorTracks"
NumSamples: 0
Duration: 0
SampleRate: 0
SampleTime: 0
Timestamps: []
TrackID: []
Category: []
Position: []
Dimension: []
Orientation: []
Velocity: []
Speed: []
Age: []
Attributes: []
UniqueTrackIDs: []
UniqueCategories: []
Add the actor track samples to the actor track data object.
timestamps = trackedActorData.Timestamps; trackID = trackedActorData.TrackID; position = trackedActorData.Position; add(trackData,timestamps,trackID,position)
Play the actor track data object.
play(trackData)
![]()
Since R2025b
This example shows you how to create a camera data object and a lidar data object from a rosbag file.
Download a ZIP file, DrivingData_Seg7_Seq30.zip, and then unzip the file. The file contains raw sensor data such as GPS data, camera data, and lidar data. The rosbag file MultiSensorDrivingData_Seg7_Seq30.bag contains 100 frames of raw camera data and 60 frames of raw lidar data.
dataFolder = pwd; dataFilename = "DrivingData_Seg7_Seq30.zip"; url = "https://ssd.mathworks.com/supportfiles/driving/data/" + dataFilename; filePath = fullfile(dataFolder,dataFilename); if ~isfile(filePath) websave(filePath,url); end unzip(filePath,dataFolder) rosFilePath = fullfile(dataFolder,"DrivingData_Seg7_Seq30","MultiSensorDrivingData_Seg7_Seq30.bag");
Create a camera data object from the rosbag file.
camData = recordedSensorData("camera",rosFilePath,"/flir_adk_out/camera_21355709/image_raw")
camData =
CameraData with properties:
Name: ''
NumSamples: 100
Duration: 14.5894
SampleRate: 6.8543
SampleTime: 0.1474
Timestamps: [100×1 double]
Frames: [100×1 string]
SensorParameters: []
Attributes: []
Play the camera data object.
play(camData)

Create a lidar data object from the rosbag file.
lidarData = recordedSensorData("lidar",rosFilePath,"/os1_cloud_node/points")
lidarData =
LidarData with properties:
Name: ''
NumSamples: 60
Duration: 14.7427
SampleRate: 4.0698
SampleTime: 0.2499
Timestamps: [60×1 double]
PointClouds: [60×1 string]
SensorParameters: []
Attributes: []
Visualize the lidar data object.
play(lidarData)
Input Arguments
Output Arguments
Version History
Introduced in R2024bSee Also
GPSData | Trajectory | CameraData | LidarData | ActorTrackData