INS
Libraries:
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
UAV Toolbox /
UAV Scenario and Sensor Modeling
Description
The block simulates an INS sensor, which outputs noise-corrupted position, velocity, and orientation based on the corresponding inputs. The block can also optionally output acceleration and angular velocity based on the corresponding inputs. To change the level of noise present in the output, you can vary the roll, pitch, yaw, position, velocity, acceleration, and angular velocity accuracies. The accuracy is defined as the standard deviation of the noise.
Examples
Simulate INS Block
Simulate an INS block by using the pose information of a vehicle undertaking a left-turn trajectory.
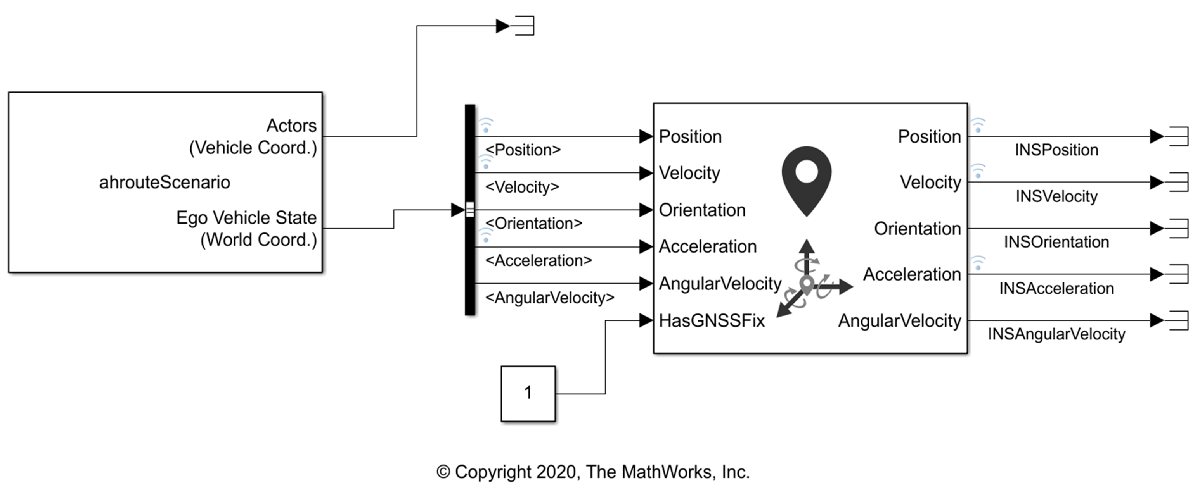
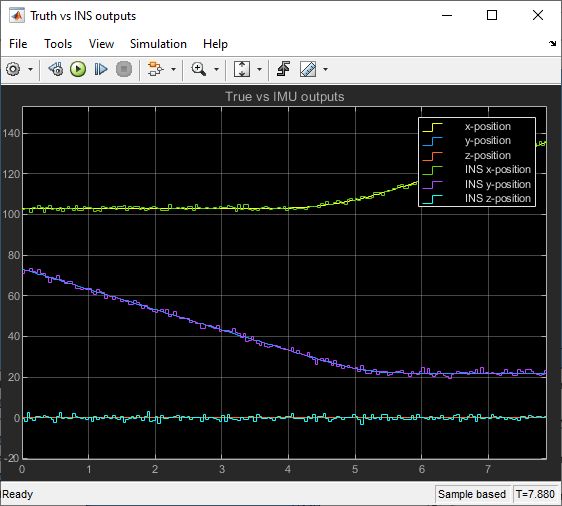
Generate INS Measurements from a Driving Scenario in Simulink
Generate measurements from an INS sensor that is mounted to a vehicle in a driving scenario. Visualize the position, velocity and acceleration profile of the vehicle using those sensor measurements in comparison with the ground truth values from the scenario.
Ports
Input
Output
Parameters
Tips
Ensure that the mounting location of the INS sensor is at the origin of the vehicle coordinates to avoid offset errors in measurements. If you are using the Driving Scenario Designer app, then the origin of the vehicle coordinates corresponds to the Rear Window mounting position.
Extended Capabilities
Version History
Introduced in R2021b