gatherLabelData
Gather synchronized label data from ground truth
Syntax
Description
labelData = gatherLabelData(gTruth,signalNames,labelTypes)gTruth. The function returns label data for the signals specified by
signalNames and the label types specified by
labelTypes.
[
additionally returns the signal timestamps associated with the gathered label data, using
the arguments from the previous syntax.labelData,timestamps] = gatherLabelData(___)
Use timestamps with the writeFrames
function to write the associated signal frames from the
groundTruthMultisignal objects to disk. Use these frames and the
associated labels as training data for machine learning or deep learning models.
[___] = gatherLabelData(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)Verbose=True enables
display to the workspace environment.
Examples
Gather label data for a video signal and a lidar point cloud sequence signal from a groundTruthMultisignal object. Write the signal frames associated with that label data to disk and visualize the frames.
Add the point cloud sequence folder path to the MATLAB® search path. The video is already on the MATLAB search path.
pcSeqDir = fullfile(toolboxdir('driving'),'core','drivingdata', ... 'lidarSequence'); addpath(pcSeqDir);
Load a groundTruthMultisignal object that contains label data for the video and the lidar point cloud sequence.
data = load('MultisignalGTruth.mat');
gTruth = data.gTruth;
Specify the signals from which to gather label data.
signalNames = ["video_01_city_c2s_fcw_10s" "lidarSequence"];
The video contains rectangle labels, whereas the lidar point cloud sequence contains cuboid labels. Gather the rectangle labels from the video and the cuboid labels from the lidar point cloud sequence.
labelTypes = [labelType.Rectangle labelType.Cuboid]; [labelData,timestamps] = gatherLabelData(gTruth,signalNames,labelTypes);
Display the first eight rows of label data from the two signals. Both signals contain data for the Car label. In the video, the Car label is drawn as a rectangle bounding box. In the lidar point cloud sequence, the Car label is drawn as a cuboid bounding box.
videoLabelSample = head(labelData{1})
lidarLabelSample = head(labelData{2})
videoLabelSample =
table
Car
_________________
{[299 213 42 33]}
lidarLabelSample =
table
Car
____________________________________________________
{[17.7444 6.7386 3.3291 3.6109 3.2214 3.5583 0 0 0]}
Write signal frames associated with the gathered label data to temporary folder locations, with one folder per signal. Use the timestamps returned by the gatherLabelData function to indicate which signal frames to write.
outputFolder = fullfile(tempdir,["videoFrames" "lidarFrames"]); fileNames = writeFrames(gTruth,signalNames,outputFolder,timestamps);
Writing 2 frames from the following signals: * video_01_city_c2s_fcw_10s * lidarSequence
Load the written video signal frames by using an imageDatastore object. Load the associated rectangle label data by using a boxLabelDatastore object.
imds = imageDatastore(fileNames{1});
blds = boxLabelDatastore(labelData{1});
Load the written lidar signal frames by using a fileDatastore object. Load the associated cuboid label data by using a boxLabelDatastore object.
fds = fileDatastore(fileNames{2},'ReadFcn',@pcread);
clds = boxLabelDatastore(labelData{2});
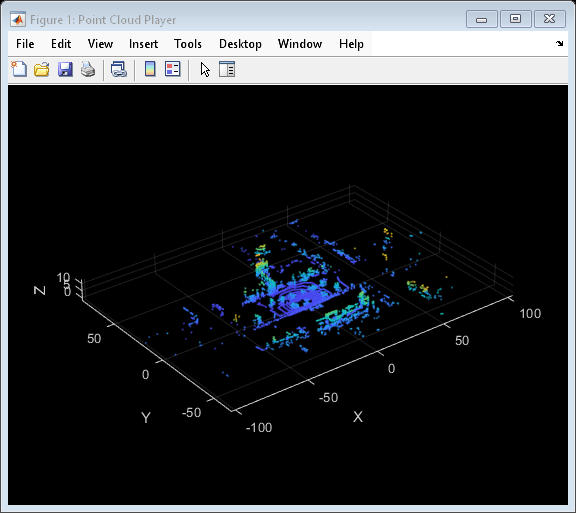
Visualize the written video frames by using a vision.VideoPlayer object. Visualize the written lidar frames by using a pcplayer object.
videoPlayer = vision.VideoPlayer; ptCloud = preview(fds); ptCloudPlayer = pcplayer(ptCloud.XLimits,ptCloud.YLimits,ptCloud.ZLimits); while hasdata(imds) % Read video and lidar frames. I = read(imds); ptCloud = read(fds); % Visualize video and lidar frames. videoPlayer(I); view(ptCloudPlayer,ptCloud); end

Remove the path to the point cloud sequence folder.
rmpath(pcSeqDir);
Input Arguments
Name-Value Arguments
Output Arguments
Label data, returned as an M-by-N cell array
of tables, where:
Mis the number ofgroundTruthMultisignalobjects ingTruth.When
labelTypescontains ROIlabelTypeenumerations,Nis the number of signals insignalNamesand the number of elements inlabelTypes. In this case,labelData{m,n}contains a table of label data for thenth signal ofsignalNamesthat is in themthgroundTruthMultisignalobject ofgTruth. The table contains label data for only the label types in thenth position oflabelTypes.When
labelTypescontains only thelabelType.Sceneenumeration,Nis equal to1. In this case,labelData{m}contains a table of scene label data across all signals in themthgroundTruthMultisignalobject ofgTruth.
For a given label data table, tbl, the table is of size
T-by-L, where:
Tis the number of timestamps in the signal for which label data exists.Lis the number of label definitions that are of the label types gathered for that signal.tbl(t,l)contains the label data gathered for thelth label at thetth timestamp.
If one of the signals has no label data at a timestamp, then the corresponding label data table does not include a row for that timestamp.
For each cell in the table, the format of the returned label data depends on the type of label.
| Label Type | Storage Format for Labels at Each Timestamp |
|---|---|
labelType.Rectangle |
|
labelType.RotatedRectangle |
For one or more rotated rectangles, specify in spatial coordinates as an M-by-5 numeric matrix, where each row specifies a rotated rectangle of the form [xctr yctr w h yaw].
|
|
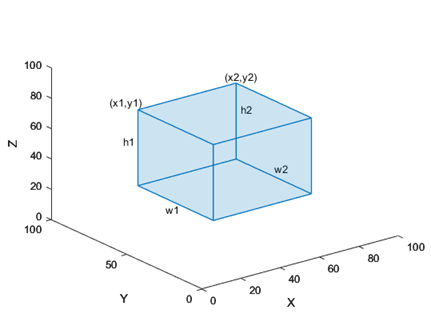
The figure shows how these values determine the position of a cuboid.
|
|
The figure shows how these values determine the position of a cuboid.
|
labelType.Line |
|
labelType.PixelLabel | Label data for all pixel label definitions is stored in a
single M-by-1 |
labelType.Polygon |
|
labelType.Scene | Logical 1 (true) if the scene label
is applied. Otherwise logical 0
(false) |

Label Data Format
Consider a cell array of label data gathered by using the
gatherLabelData function. The function gathers labels from
three groundTruthMultisignal objects with variable names
gTruth1, gTruth2, and
gTruth3.
For a video signal named
video_front_camera, the function gathers labels of typeRectangleandLine.For a lidar point cloud sequence signal stored in a folder named
lidarData, the function gathers labels of typeCuboid.
This code shows the call to the gatherLabelData
function.
labelData = gatherLabelData([gTruth1 gTruth2 gTruth3], ... ["video_front_camera", ... "lidarData"], ... {[labelType.Rectangle labelType.Line], ... labelType.Cuboid};
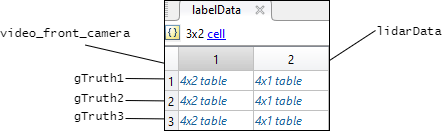
labelData output is a 3-by-2 cell array of tables. Each row of
the cell array contains label data for one of the
groundTruthMultisignal objects. The first column contains the label
data for the video signal, video_front_camera. The second column
contains the label data for the point cloud sequence signal,
lidarData. This figure shows the labelData
cell array.
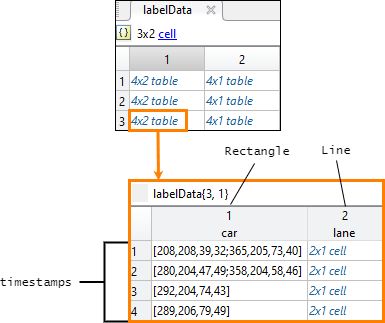
This figure shows the label data table for the video signal in the third
groundTruthMultisignal object. The
gatherLabelData function gathered data for a
Rectangle label named car and a
Line label named lane. The table contains
label data at four timestamps in the signal.
This figure shows the label data table for the lidar signal in the third
groundTruthMultisignal object. The
gatherLabelData function gathered data for a
Cuboid label, also named car. The
car label appears in both signal types because it is marked as a
Rectangle label for video signals and a Cuboid
label for lidar signals. The table contains label data at four timestamps in the
signal.

Signal timestamps, returned as an M-by-N cell
array of duration vectors, where:
Mis the number ofgroundTruthMultisignalobjects ingTruth.Nis the number of signals insignalNames.labelData{m,n}contains the timestamps for thenth signal ofsignalNamesthat is in themthgroundTruthMultisignalobject ofgTruth.
If you gather label data from multiple signals, the signal timestamps are
synchronized to the timestamps of the first signal specified by
signalNames.
Version History
Introduced in R2020a