interpolate
Interpolate poses along planned vehicle path
Syntax
Description
poses = interpolate(refPath)
[
also returns the motion directions of the vehicle at each pose, using inputs from any of the
preceding syntaxes.poses,directions] = interpolate(___)
Examples
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)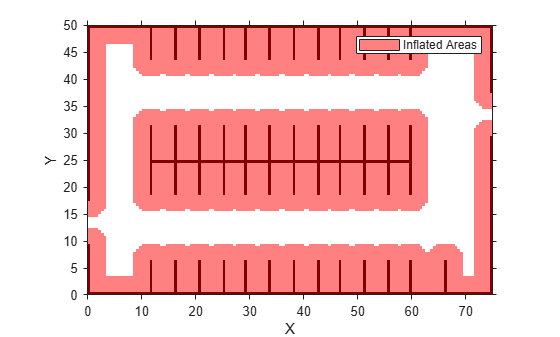
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
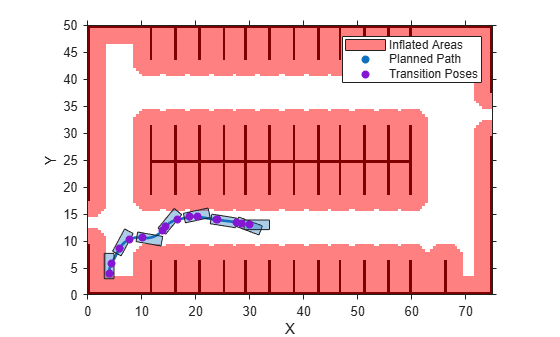
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Plan a vehicle path through a parking lot by using the rapidly exploring random tree (RRT*) algorithm. Interpolate the poses of the vehicle at points along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)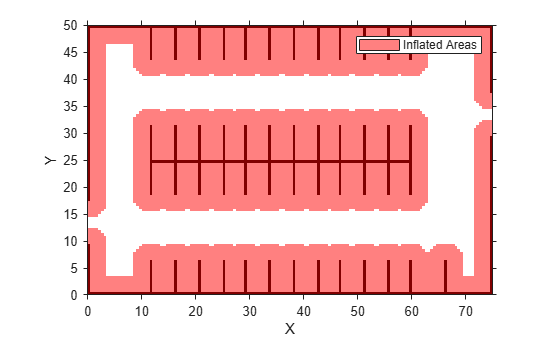
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
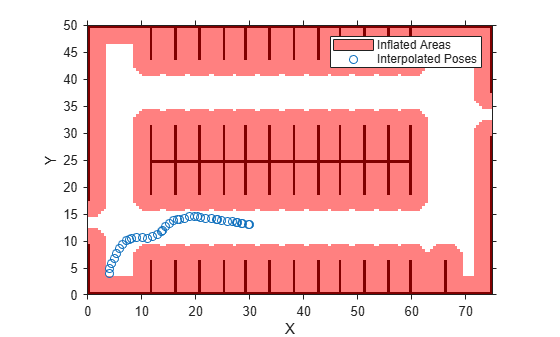
Interpolate the vehicle poses every 1 meter along the entire path.
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
Plot the interpolated poses on the costmap.
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off
Input Arguments
Output Arguments
More About
A path is composed of multiple segments that are combinations of
motions (for example, left turn, straight, and right turn). Transition
poses are vehicle poses corresponding to the end of one motion and the
beginning of another motion. They represent points along the path corresponding to a change
in the direction or orientation of the vehicle. The interpolate
function always returns transition poses, even if you interpolate only at specified points
along the path.
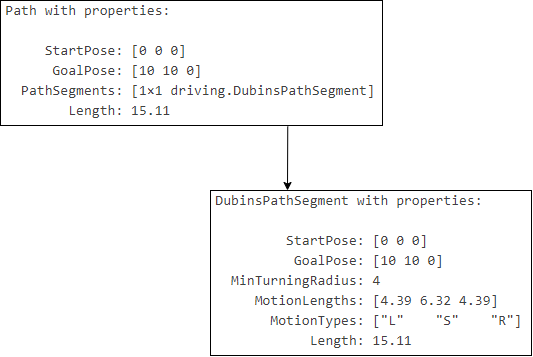
The path length between transition poses is given by the
MotionLengths property of the path segments. For example, consider
the following path, which is a driving.Path
object composed of a single Dubins path segment. This segment consists of three motions, as
described by the MotionLengths and MotionTypes
properties of the segment.
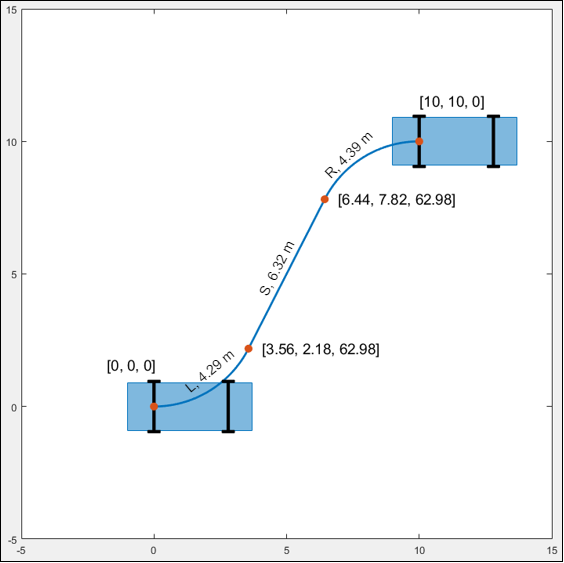
The interpolate function interpolates the following transition
poses in this order:
The initial pose of the vehicle,
StartPose.The pose after the vehicle turns left (
"L") for 4.39 meters at its maximum steering angle.The pose after the vehicle goes straight (
"S") for 6.32 meters.The pose after the vehicle turns right (
"R") for 4.39 meters at its maximum steering angle. This pose is also the goal pose, because it is the last pose of the entire path.
The plot shows these transition poses, which are [x, y, Θ] vectors. x and y specify the location of the vehicle in world units, such as meters. Θ specifies the orientation angle of the vehicle in degrees.
Extended Capabilities
Version History
Introduced in R2018b