sgdmupdate
Update parameters using stochastic gradient descent with momentum (SGDM)
Syntax
Description
Update the network learnable parameters in a custom training loop using the stochastic gradient descent with momentum (SGDM) algorithm.
Note
This function applies the SGDM optimization algorithm to update network parameters in
custom training loops. To train a neural network using the trainnet function
using the SGDM solver, use the trainingOptions function and set the solver to
"sgdm".
[
updates the learnable parameters of the network netUpdated,vel] = sgdmupdate(net,grad,vel)net using the SGDM
algorithm. Use this syntax in a training loop to iteratively update a network defined as a
dlnetwork object.
Examples
Perform a single SGDM update step with a global learning rate of
0.05 and momentum of 0.95.
Create the parameters and parameter gradients as numeric arrays.
params = rand(3,3,4); grad = ones(3,3,4);
Initialize the parameter velocities for the first iteration.
vel = [];
Specify custom values for the global learning rate and momentum.
learnRate = 0.05; momentum = 0.95;
Update the learnable parameters using sgdmupdate.
[params,vel] = sgdmupdate(params,grad,vel,learnRate,momentum);
Use sgdmupdate to train a network using the SGDM algorithm.
Load Training Data
Load the digits training data.
[XTrain,TTrain] = digitTrain4DArrayData; classes = categories(TTrain); numClasses = numel(classes);
Define Network
Define the network architecture and specify the average image value using the Mean option in the image input layer.
layers = [
imageInputLayer([28 28 1],'Mean',mean(XTrain,4))
convolution2dLayer(5,20)
reluLayer
convolution2dLayer(3,20,'Padding',1)
reluLayer
convolution2dLayer(3,20,'Padding',1)
reluLayer
fullyConnectedLayer(numClasses)
softmaxLayer];Create a dlnetwork object from the layer array.
net = dlnetwork(layers);
Define Model Loss Function
Create the helper function modelLoss, listed at the end of the example. The function takes a dlnetwork object and a mini-batch of input data with corresponding labels, and returns the loss and the gradients of the loss with respect to the learnable parameters.
Specify Training Options
Specify the options to use during training.
miniBatchSize = 128; numEpochs = 20; numObservations = numel(TTrain); numIterationsPerEpoch = floor(numObservations./miniBatchSize);
Train Network
Initialize the velocity parameter.
vel = [];
Calculate the total number of iterations for the training progress monitor.
numIterations = numEpochs * numIterationsPerEpoch;
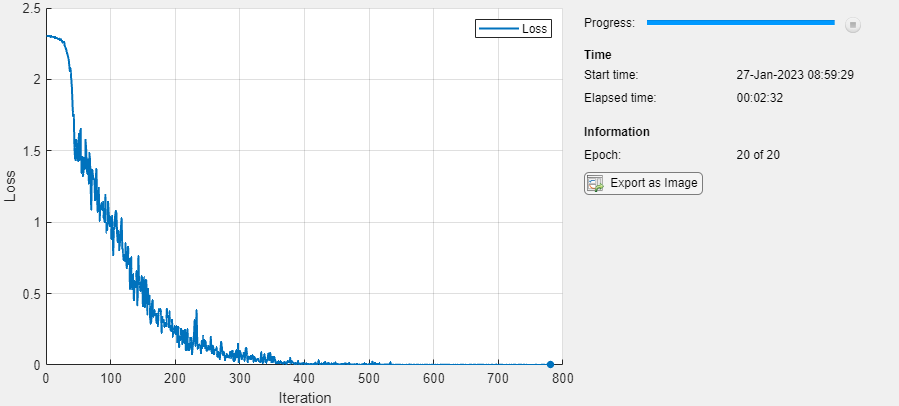
Initialize the TrainingProgressMonitor object. Because the timer starts when you create the monitor object, make sure that you create the object close to the training loop.
monitor = trainingProgressMonitor(Metrics="Loss",Info="Epoch",XLabel="Iteration");
Train the model using a custom training loop. For each epoch, shuffle the data and loop over mini-batches of data. Update the network parameters using the sgdmupdate function. At the end of each iteration, display the training progress.
Train on a GPU, if one is available. Using a GPU requires Parallel Computing Toolbox™ and a supported GPU device. For information on supported devices, see GPU Computing Requirements (Parallel Computing Toolbox).
iteration = 0; epoch = 0; while epoch < numEpochs && ~monitor.Stop epoch = epoch + 1; % Shuffle data. idx = randperm(numel(TTrain)); XTrain = XTrain(:,:,:,idx); TTrain = TTrain(idx); i = 0; while i < numIterationsPerEpoch && ~monitor.Stop i = i + 1; iteration = iteration + 1; % Read mini-batch of data and convert the labels to dummy % variables. idx = (i-1)*miniBatchSize+1:i*miniBatchSize; X = XTrain(:,:,:,idx); T = zeros(numClasses, miniBatchSize,"single"); for c = 1:numClasses T(c,TTrain(idx)==classes(c)) = 1; end % Convert mini-batch of data to a dlarray. X = dlarray(single(X),"SSCB"); % If training on a GPU, then convert data to a gpuArray. if canUseGPU X = gpuArray(X); end % Evaluate the model loss and gradients using dlfeval and the % modelLoss function. [loss,gradients] = dlfeval(@modelLoss,net,X,T); % Update the network parameters using the SGDM optimizer. [net,vel] = sgdmupdate(net,gradients,vel); % Update the training progress monitor. recordMetrics(monitor,iteration,Loss=loss); updateInfo(monitor,Epoch=epoch + " of " + numEpochs); monitor.Progress = 100 * iteration/numIterations; end end
Test the Network
Test the classification accuracy of the model by comparing the predictions on a test set with the true labels.
[XTest,TTest] = digitTest4DArrayData;
Convert the data to a dlarray with the dimension format "SSCB" (spatial, spatial, channel, batch). For GPU prediction, also convert the data to a gpuArray.
XTest = dlarray(XTest,"SSCB"); if canUseGPU XTest = gpuArray(XTest); end
To classify images using a dlnetwork object, use the predict function and find the classes with the highest scores.
YTest = predict(net,XTest); [~,idx] = max(extractdata(YTest),[],1); YTest = classes(idx);
Evaluate the classification accuracy.
accuracy = mean(YTest==TTest)
accuracy = 0.9910
Model Loss Function
The modelLoss function takes a dlnetwork object net and a mini-batch of input data X with corresponding labels T, and returns the loss and the gradients of the loss with respect to the learnable parameters in net. To compute the gradients automatically, use the dlgradient function.
function [loss,gradients] = modelLoss(net,X,T) Y = forward(net,X); loss = crossentropy(Y,T); gradients = dlgradient(loss,net.Learnables); end
Input Arguments
Output Arguments
Algorithms
References
[1] Murphy, K. P. Machine Learning: A Probabilistic Perspective. The MIT Press, Cambridge, Massachusetts, 2012.