looptuneSetup
Convert tuning setup for looptune to tuning setup for
systune
Description
[
converts a tuning setup for T0,SoftReqs,HardReqs,sysopt]
= looptuneSetup(looptuneInputs)looptune into an equivalent tuning
setup for systune. The argument
looptuneInputs is a sequence of input arguments for
looptune that specifies the tuning setup. For example,
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(G0,C0,wc,Req1,Req2,loopopt)
looptune(G0,C0,wc,Req1,Req2,loopopt)
and systune(T0,SoftReqs,HardReqs,sysopt) produce the same
results.Use this command to take advantage of additional flexibility that
systune offers relative to looptune.
For example, looptune requires that you tune all channels of a
MIMO feedback loop to the same target bandwidth. Converting to
systune allows you to specify different crossover frequencies
and loop shapes for each loop in your control system. Also,
looptune treats all tuning requirements as soft
requirements, optimizing them but not requiring that any constraint be exactly met.
Converting to systune allows you to enforce some tuning
requirements as hard constraints, while treating others as soft requirements.
You can also use this command to probe into the tuning requirements used by
looptune.
Note
When tuning Simulink® models through an slTuner interface, use
looptuneSetup (Simulink Control Design) for
slTuner.
Examples
Convert a set of looptune inputs into an
equivalent set of inputs for systune.
Suppose you have a numeric plant model, G0, and a tunable
controller model, C0. Suppose also that you used
looptune to tune the feedback loop between
G0 and C0 to within a bandwidth of
wc = [wmin,wmax]. Convert these variables into a form
that allows you to use systune for further tuning.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(C0,G0,wc);
The command returns the closed-loop system and tuning requirements for the
equivalent systune command,
systune(CL0,SoftReqs,HardReqs,sysopt). The arrays
SoftReqs and HardReqs contain the
tuning requirements implicitly imposed by looptune. These
requirements enforce the target bandwidth and default stability margins of
looptune.
If you used additional tuning requirements when tuning the system with
looptune, add them to the input list of
looptuneSetup. For example, suppose you used a
TuningGoal.Tracking requirement,
Req1, and a TuningGoal.Rejection
requirement, Req2. Suppose also that you set algorithm
options for looptune using
looptuneOptions. Incorporate these requirements and
options into the equivalent systune command.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(C0,G0,wc,Req1,Req2,loopopt);
The resulting arguments allow you to construct an equivalent tuning
problem for systune. In particular, [~,C] =
looptune(C0,G0,wc,Req1,Req2,loopopt) yields the same result as
the following commands.
T = systune(T0,SoftReqs,HardReqs,sysopt); C = setBlockValue(C0,T);
Set up the following control system for tuning with looptune. Then convert the setup to a systune problem and examine the results. These results reflect the structure of the control system model that looptune tunes. The results also reflect the tuning requirements implicitly enforced when tuning with looptune.
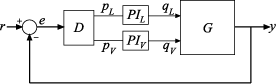
For this example, the 2-by-2 plant G is represented by:
The fixed-structure controller, C, includes three components: the 2-by-2 decoupling matrix D and two PI controllers PI_L and PI_V. The signals r, y, and e are vector-valued signals of dimension 2.
Build a numeric model that represents the plant and a tunable model that represents the controller. Name all inputs and outputs as in the diagram, so that looptune and looptuneSetup know how to interconnect the plant and controller via the control and measurement signals.
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = {'y'}; D = tunableGain('Decoupler',eye(2)); D.InputName = 'e'; D.OutputName = {'pL','pV'}; PI_L = tunablePID('PI_L','pi'); PI_L.InputName = 'pL'; PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.InputName = 'pV'; PI_V.OutputName = 'qV'; sum1 = sumblk('e = r - y',2); C0 = connect(PI_L,PI_V,D,sum1,{'r','y'},{'qL','qV'});
This system is now ready for tuning with looptune, using tuning goals that you specify. For example, specify a target bandwidth range. Create a tuning requirement that imposes reference tracking in both channels of the system with a response time of 15 s, and a disturbance rejection requirement.
wc = [0.1,0.5]; TR = TuningGoal.Tracking('r','y',15,0.001,1); DR = TuningGoal.Rejection({'qL','qV'},1/s); DR.Focus = [0 0.1]; [G,C,gam,info] = looptune(G,C0,wc,TR,DR);
Final: Peak gain = 1, Iterations = 42 Achieved target gain value TargetGain=1.
looptune successfully tunes the system to these requirements. However, you might want to switch to systune to take advantage of additional flexibility in configuring your problem. For example, instead of tuning both channels to a loop bandwidth inside wc, you might want to specify different crossover frequencies for each loop. Or, you might want to enforce the tuning requirements TR and DR as hard constraints, and add other requirements as soft requirements.
Convert the looptune input arguments to a set of input arguments for systune.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(G,C0,wc,TR,DR);
This command returns a set of arguments you can provide to systune for equivalent results to tuning with looptune. In other words, the following command is equivalent to the previous looptune command.
[T,fsoft,ghard,info] = systune(T0,SoftReqs,HardReqs,sysopt);
Final: Peak gain = 1, Iterations = 42 Achieved target gain value TargetGain=1.
Examine the arguments returned by looptuneSetup.
T0
Generalized continuous-time state-space model with 0 outputs, 2 inputs, 4 states, and the following blocks: APU_: Analysis point, 2 channels, 1 occurrences. APY_: Analysis point, 2 channels, 1 occurrences. Decoupler: Tunable 2x2 gain, 1 occurrences. PI_L: Tunable PID controller, 1 occurrences. PI_V: Tunable PID controller, 1 occurrences. Model Properties Type "ss(T0)" to see the current value and "T0.Blocks" to interact with the blocks.
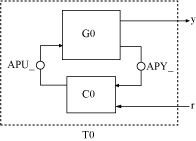
The software constructs the closed-loop control system for systune by connecting the plant and controller at their control and measurement signals, and inserting a two-channel AnalysisPoint block at each of the connection locations, as illustrated in the following diagram.
When tuning the control system of this example with looptune, all requirements are treated as soft requirements. Therefore, HardReqs is empty. SoftReqs is an array of TuningGoal requirements. These requirements together enforce the bandwidth and margins of the looptune command, plus the additional requirements that you specified.
SoftReqs
SoftReqs=5×1 heterogeneous SystemLevel (LoopShape, Tracking, Rejection, ...) array with properties:
Models
Openings
Name
Examine the first entry in SoftReqs.
SoftReqs(1)
ans =
LoopShape with properties:
LoopGain: [1×1 zpk]
CrossTol: 0.3495
Focus: [0 Inf]
Stabilize: 1
LoopScaling: 'on'
Location: {2×1 cell}
Models: NaN
Openings: {0×1 cell}
Name: 'Open loop CG'
looptuneSetup expresses the target crossover frequency range wc as a TuningGoal.LoopShape requirement. This requirement constrains the open-loop gain profile to the loop shape stored in the LoopGain property, with a crossover frequency and crossover tolerance (CrossTol) determined by wc. Examine this loop shape.
viewGoal(SoftReqs(1))
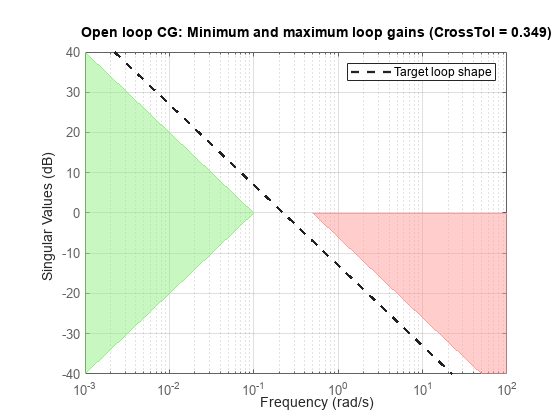
The target crossover is expressed as an integrator gain profile with a crossover between 0.1 and 0.5 rad/s, as specified by wc. If you want to specify a different loop shape, you can alter this TuningGoal.LoopShape requirement before providing it to systune.
looptune also tunes to default stability margins that you can change using looptuneOptions. For systune, stability margins are specified using TuningGoal.Margins requirements. Here, looptuneSetup has expressed the default stability margins of looptune as soft TuningGoal.Margins requirements. For example, examine the fourth entry in SoftReqs.
SoftReqs(4)
ans =
Margins with properties:
GainMargin: 7.6000
PhaseMargin: 45
ScalingOrder: 0
Focus: [0 Inf]
Location: {2×1 cell}
Models: NaN
Openings: {0×1 cell}
Name: 'Margins at plant inputs'
The last entry in SoftReqs is a similar TuningGoal.Margins requirement constraining the margins at the plant outputs. looptune enforces these margins as soft requirements. If you want to convert them to hard constraints, pass them to systune in the input vector HardReqs instead of the input vector SoftReqs.
Input Arguments
Output Arguments
Closed-loop control system model for tuning with
systune, returned as a generalized state-space
genss model. To compute T0, the
plant, G0, and the controller, C0, are
combined in the feedback configuration of the following illustration.
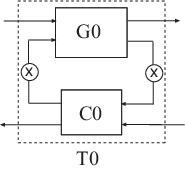
The connections between C0 and G0
are determined by matching signals using the InputName
and OutputName properties of the two models. In general,
the signal lines in the diagram can represent vector-valued signals.
AnalysisPoint blocks, indicated by X in the diagram,
are inserted between the controller and the plant. This allows definition of
open-loop and closed-loop requirements on signals injected or measured at
the plant inputs or outputs. For example, the bandwidth
wc is converted into a
TuningGoal.LoopShape requirement that imposes the
desired crossover on the open-loop signal measured at the plant
input.
For more information on the structure of closed-loop control system models
for tuning with systune, see the systune reference
page.
Soft tuning requirements for tuning with systune,
specified as a vector of TuningGoal requirement objects.
looptune expresses most of its implicit tuning
requirements as soft tuning requirements. For example, a specified target
loop bandwidth is expressed as a TuningGoal.LoopShape
requirement with integral gain profile and crossover at the target
frequency. Additionally, looptune treats all of the
explicit requirements you specify (Req1,...ReqN) as soft
requirements. SoftReqs contains all of these tuning
requirements.
Hard tuning requirements (constraints) for tuning with
systune, specified as a vector of
TuningGoal requirement objects.
Because looptune treats most tuning requirements as
soft requirements, HardReqs is usually empty. However,
if you change the default MaxFrequency option of the
looptuneOptions set, loopopt, then
this requirement appears as a hard TuningGoal.Poles
constraint.
Alternatives
When tuning Simulink using an slTuner, interface, convert a
looptune problem to systune using looptuneSetup (Simulink Control Design) for slTuner.
Version History
Introduced in R2013bSee Also
looptune | systune | looptuneOptions | systuneOptions | genss | slTuner (Simulink Control Design) | looptuneSetup (for slTuner) (Simulink Control Design)