pcmapndt
Localization map based on normal distributions transform (NDT)
Description
The pcmapndt object creates a normal distributions transform
(NDT) map from a prebuilt point cloud map of the environment. The NDT map is a compressed,
memory-efficient representation suitable for localization. The object converts the point cloud
map into a set of voxels (3-D boxes), each represented by a 3-D normal distribution. Use the
selectSubmap
object function to select a submap within the map from a coarse position estimate. Use the
findPose object
function to localize the pose of the sensor based on the assembled map.
Creation
Description
ndtMap = pcmapndt(ptCloudMap,voxelSize)ptCloudMap.
Input Arguments
Properties
Object Functions
selectSubmap | Select submap within map |
isInsideSubmap | Check if query position is inside selected submap |
findPose | Localize point cloud within map using normal distributions transform (NDT) algorithm |
show | Visualize normal distributions transform (NDT) map |
Examples
Load a point cloud view set, which was saved from a pcviewset object.
data = load('vSetPointClouds.mat');
vSet = data.vSet;Extract point clouds and absolute poses to build a map.
ptClouds = vSet.Views.PointCloud; tforms = vSet.Views.AbsolutePose;
Create a point cloud map by aligning the point cloud scans using the absolute poses.
ptCloudMap = pcalign(ptClouds,tforms);
Create and visualize an NDT map from a point cloud map.
voxelSize = 1;
ndtMap = pcmapndt(ptCloudMap,voxelSize);
figure
show(ndtMap)
view(2) % Change viewing angle to top-view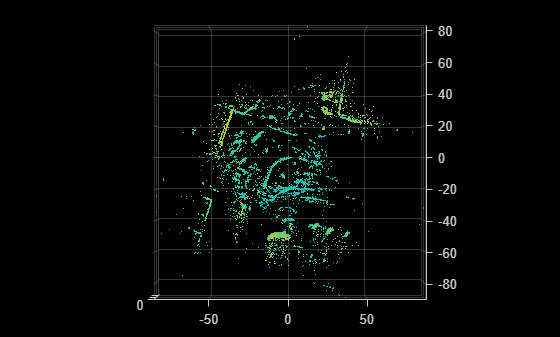
Load a normal distributions transform (NDT) map from a MAT file.
data = load('ndtMapParkingLot.mat');
ndtMap = data.ndtMapParkingLot;Load point cloud scans and pose estimates from a second MAT file.
data = load('parkingLotData.mat');
ptCloudScans = data.parkingLotData.ptCloudScans;
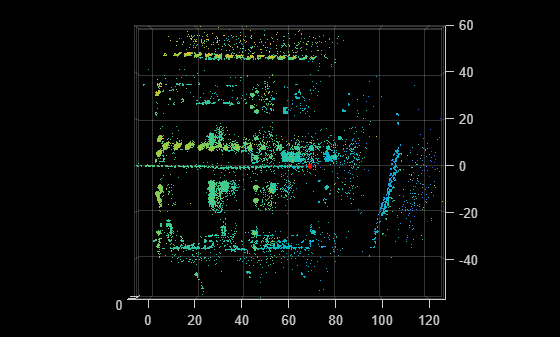
initPoseEsts = data.parkingLotData.initPoseEsts;Display the NDT map.
show(ndtMap)
Change the viewing angle to top-view.
view(2)
Select the submap centered around the first estimate.
center = initPoseEsts(1).Translation; sz = [70 50 20]; ndtMap = selectSubmap(ndtMap,center,sz);
Set the radius for visualization of the current location and the distance threshold to update the submap.
radius = 0.5; distThresh = 15;
Loop over the point clouds, localize them in the map, and update the selected submap as needed.
numScans = numel(ptCloudScans); for n = 1:numScans ptCloud = ptCloudScans(n); initPose = initPoseEsts(n); poseTranslation = initPose.Translation; [isInside,distToEdge] = isInsideSubmap(ndtMap,poseTranslation); submapNeedsUpdate = ~isInside ... % Current pose is outside submap || any(distToEdge(1:2) < distThresh); % Current pose is close to submap edge if submapNeedsUpdate ndtMap = selectSubmap(ndtMap,poseTranslation,sz); end % Localize the point cloud scan in the map. currPose = findPose(ndtMap,ptCloud,initPose); % Display the position of the estimate as a circle. pos = [currPose.Translation(1:2) radius]; showShape('circle',pos,'Color','r'); % Pause to view the change. pause(0.05) end
References
Biber, P., and W. Strasser. “The Normal Distributions Transform: A New Approach to Laser Scan Matching.” In Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453) Vol. 3, 2743–48. Las Vegas, Nevada, USA: IEEE, 2003. https://doi.org/10.1109/IROS.2003.1249285.
[1] Magnusson, Martin. "The Three-Dimensional Normal-Distributions Transform: An Efficient Representation for Registration, Surface Analysis, and Loop Detection." PhD thesis, Örebro universitet, 2009. http://urn.kb.se/resolve?urn=urn:nbn:se:oru:diva-8458 urn:nbn:se:oru:diva-8458.
Extended Capabilities
Version History
Introduced in R2021a